WSN 拓扑控制
拓扑控制作为 WSN 的关键支撑技术,直接决定了网络的能耗效率、连通性、覆盖质量等核心性能,是延长网络生命周期的核心手段。
拓扑结构和拓扑控制
WSN 的拓扑结构由活动节点集合和直接通信的活动链路共同决定,用拓扑图G=(V,E)表示:
- V:网络中所有节点的集合(包括传感器节点、骨干节点、Sink 节点等);
- E:边的集合,若两个节点v1和v2之间能直接通信,则(v1,v2)∈E。
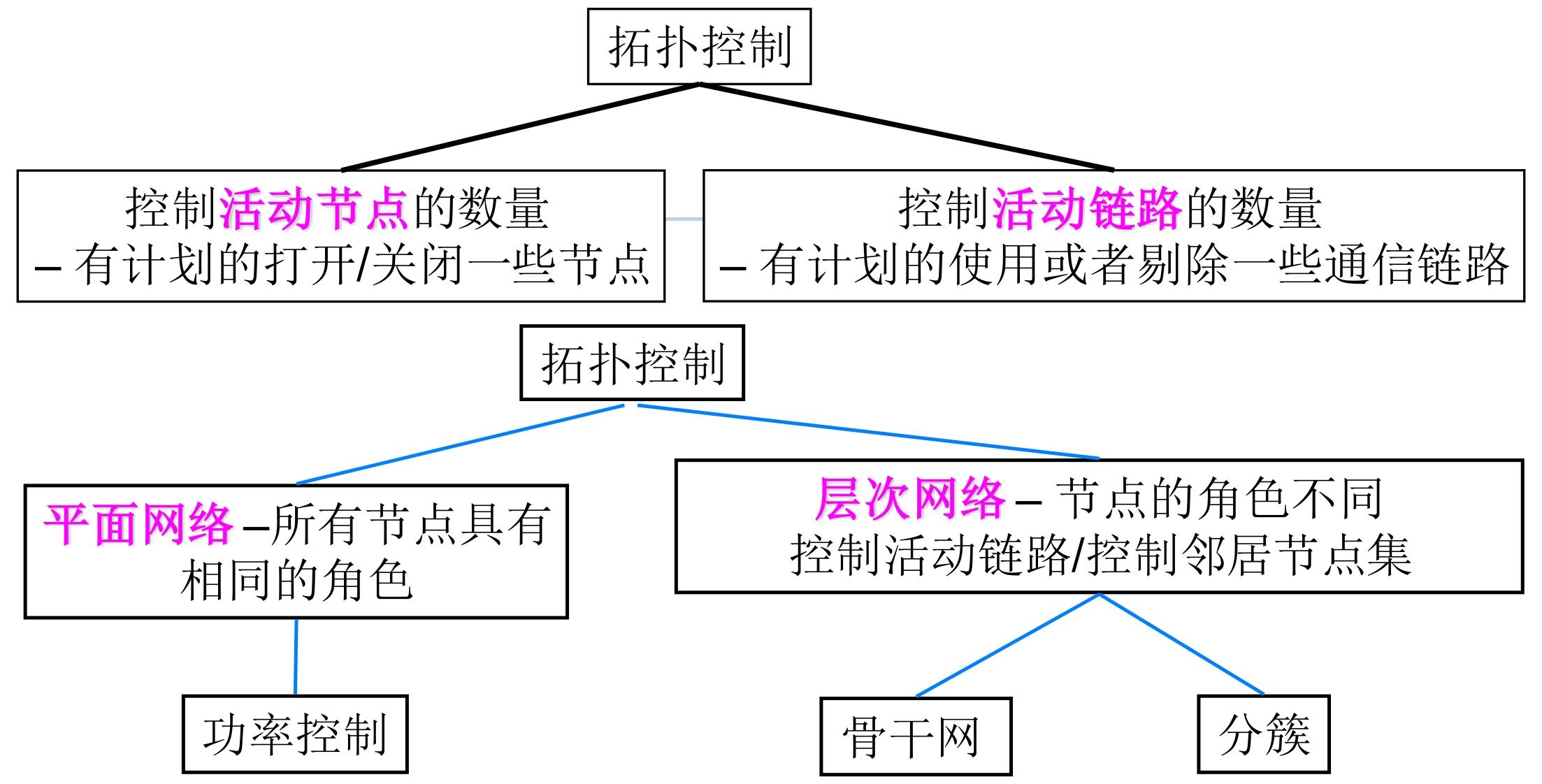
拓扑控制的核心思路是:通过 “合理取舍” 节点和链路,构建优化的拓扑结构
从而解决节点密集部署、能量有限、资源受限,原始的密集拓扑会带来三大核心问题:媒体访问冲突,路由效率低下,能量浪费严重
拓扑控制没有明确的对应层次,部署于媒体访问控制层(MAC)和网络层(ROUTING)之间:
- 从 MAC 层获取邻居节点消息,用于维护拓扑;
- 为网络层路由提供连通的网络结构,是路由协议的基础。
拓扑控制的核心目标是:
- 首要目标:延长网络生命周期(WSN 节点能量不可更换,这是最核心的诉求);
- 约束条件:保证一定的 “连通质量”(节点间能通过多跳或直接通信可达)和 “覆盖质量”(监测区域无盲区);
- 兼顾性能:降低通信干扰、减少网络延迟、实现负载均衡、简化算法复杂度、保证可扩展性。
WSN拓扑结构
WSN(无线传感器网络)的拓扑结构是网络功能实现的基础框架,核心按 “节点功能分工” 和 “结构层次” 分为平面网络结构和层次网络结构两大类
总的来说,两类拓扑结构的本质区别的是节点是否有功能差异:
- 平面网络:所有节点 “身份平等、功能一致”,无主次之分;
层次网络:节点 “身份有别、功能分工”,分为核心节点和普通节点,形成上下层级。
平面网络结构(Flat Networks)
- 平面网络的核心是 “所有节点完全对等”,节点的地位对等,同时功能一致,协议相同
控制策略:功率控制
- 平面网络中所有节点功能一致,无法通过 “分工” 减少能耗,因此控制策略聚焦于 “优化链路”—— 通过功率控制调整邻居节点集合,即节点根据实际需求动态调整发射功率
- 优化拓扑结构让拓扑稀疏,通过降低功率,只保留与近距离、必要节点的通信链路
层次网络结构(Hierarchical Networks)
层次网络也称 “分级网络”,核心是 “节点功能差异化”,分为两大节点类型,形成 “上层骨干网 + 下层普通节点” 的层级:
- 骨干节点:成本高但是具有完整功能:路由转发、网络管理、数据汇聚(收集普通节点数据并处理)、簇间通信
- 一般传感器节点:仅数据采集(如温度、湿度监测),无路由、管理功能,同时相互不通信
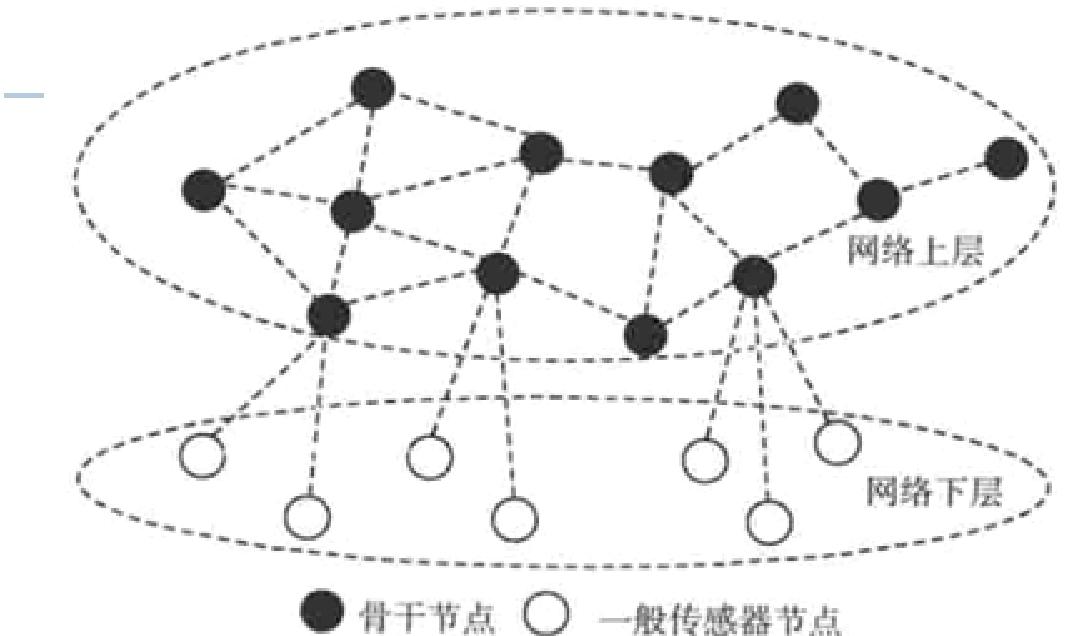
对于骨干节点构成的网络上层而言,各个节点之间是对等结构,类似平面网络
而普通节点之间不直接通信,所有数据都要通过骨干节点转发,构成网络下层。
两大控制形式:骨干网与分簇(Clustering)
- 骨干网(Backbone):从所有节点中筛选出一部分 “控制节点”,形成 “控制集(Dominating Set)”,即骨干网;
- 簇状网(Clustering):将网络划分为多个 “簇(Cluster)”,每个簇由 1 个 “簇头”(骨干节点)和多个 “簇内普通节点” 组成;
簇状网(Clustering)
簇状网(Clustering)是无线传感器网络(WSN)层次型拓扑结构的核心实现形式,核心逻辑是通过 “分簇分组” 实现节点功能分工,从而降低能耗、优化数据传输效率
簇状网的本质是把整个网络 “划分为多个独立小组(簇,Cluster)”,每个小组实行 “组长(簇头)+ 组员(普通节点)” 的管理模式
- 全员分簇:网络中所有节点都必须被划分到某个簇中,无 “无归属” 节点(保证网络全覆盖);
- 簇头唯一:每个簇有且仅有一个 “簇头(Cluster Head)”,是簇内的核心节点(负责管理和数据处理);
- 直接通信:簇内所有普通节点都必须是其簇头的 “直接邻居”—— 即普通节点与簇头之间能直接通信,无需其他节点转发(减少数据上传的延迟和能耗);
- 归属唯一:每个普通节点仅属于一个簇(避免数据重复上传和管理混乱);
- 例外:簇间桥梁节点(极少数节点,用于连接不同簇,实现簇间数据互通)可跨簇归属;
- 簇头独立:不同簇的簇头之间彼此独立,不直接通信(簇间数据需通过骨干网或桥梁节点转发,避免簇头负载过重);
- 簇头构成控制集:所有簇头组成的集合(簇头集合 C)是网络的 “控制集”—— 意味着每个普通节点都被至少一个簇头覆盖(能直接通信),且簇头能控制簇内节点的通信行为。
WSN拓扑控制
拓扑控制算法的评价准则,是判断算法 “好不好用”“适不适合实际场景” 的核心标准
连通性(Connectivity)
- 连通性是拓扑控制的最基础要求,指算法优化后的拓扑结构中,任意两个活动节点之间都能通过直接或多跳链路实现通信(即网络没有被 “分割” 成孤立的区域)。
- 这保证了网络的“连通性寿命”,即WSN 网络生存期
扩展因子(Stretch Factor)
衡量剔除连接对于任意节点之间路径的影响
跳扩展因子(Hop Stretch Factor)
衡量 “路径跳数的增长比例”,公式为:
能量扩展因子(Energy Stretch Factor)
衡量 “路径能耗的增长比例”,公式为:
必须避免 “为了简化而简化”—— 不能为了减少链路 / 节点,而让节点间的通信路径变得 “又长又费电”,要在 “简化拓扑” 和 “路径质量” 之间找平衡。
吞吐量(Throughput)
- 吞吐量指优化后的拓扑结构单位时间内能够传输的数据总量,要求与原始网络的吞吐量相近
鲁棒性(Robustness)
- 当网络拓扑发生变化时(如节点失效、链路中断、新节点加入),算法的调整开销最小,能快速恢复网络功能。
算法总开销(Algorithm Overhead)
- 算法总开销指算法运行过程中消耗的资源成本小,比如计算量和通信控制信息的开销
平面网络拓扑控制:功率控制
平面网络中,所有节点功能对等、无主次之分,功率控制是其核心拓扑控制策略 —— 本质是 “动态调功率、保连通、省能耗”
功率控制(也称功率分配问题)的核心逻辑的是:
- 节点不始终用最大功率通信,而是根据实际需求动态调整发射功率;
- 在保证网络所有节点连通的前提下,让整个网络的能耗最小,从而延长网络生存时间;
节点调整发射功率的依据是 “距离与接收功率的关系”:
集中式功率控制算法
最基础的功率控制算法,核心是 “用最小的总功率让网络连通”,适合节点数量少、距离已知的场景。
算法前提:通信代价已知,独立设置通信功率
贪婪算法:“从小到大连分支,直到全网连通”:其实类似于并查集,同时在合并时确定两个节点的通信距离
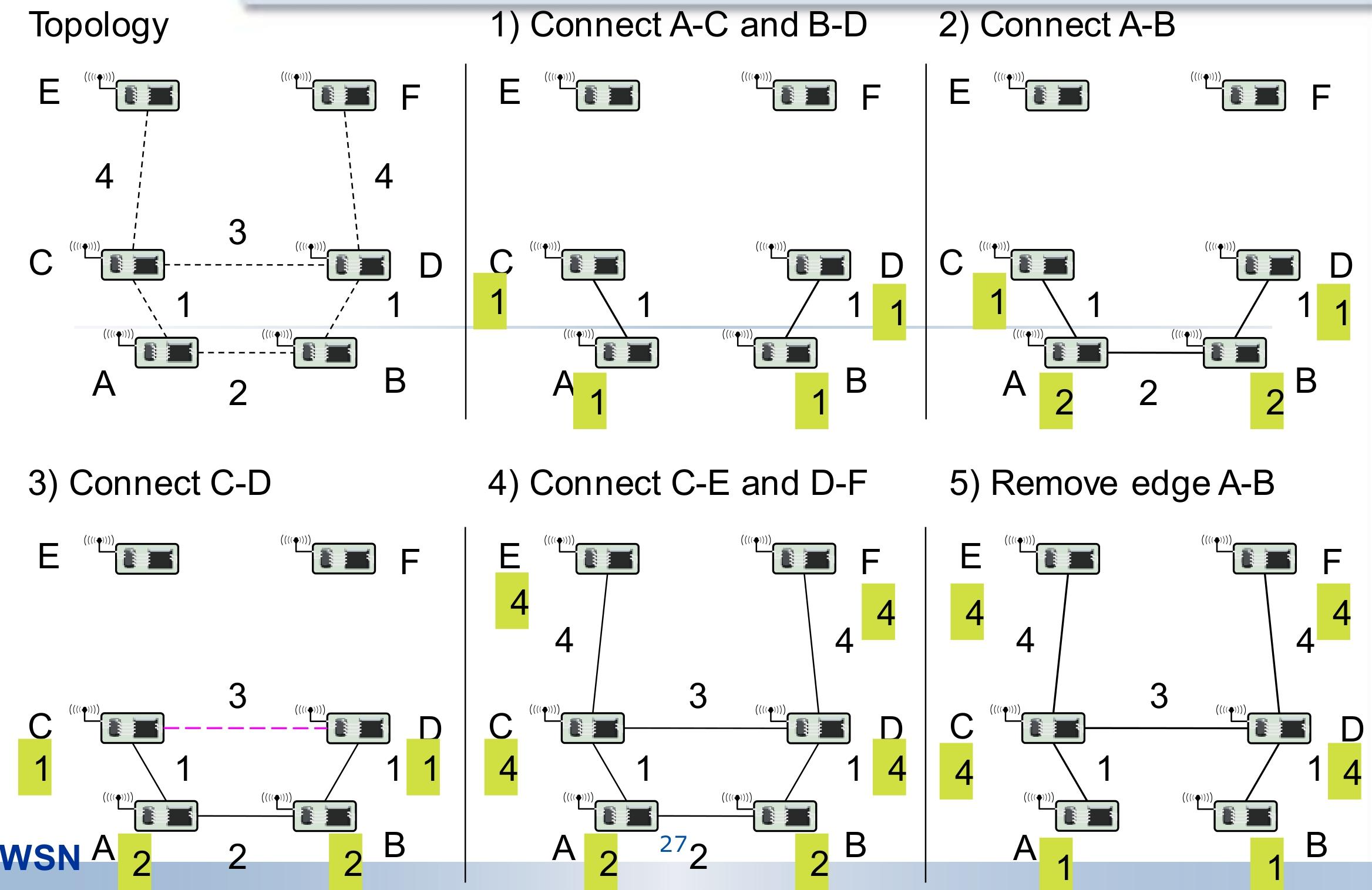
分为两个阶段:构建连通网络、优化节点功率
- 构建连通网络
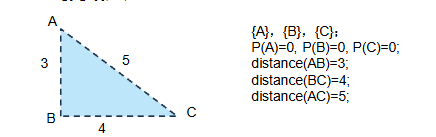
初始状态:所有节点发射功率为 0,每个节点是一个独立的连通分支(比如 3 个节点 A、B、C,初始分支是 {A}、{B}、{C});
步骤 1:将所有节点对按距离从小到大排序;
步骤 2:依次处理排序后的节点对,若两个节点属于不同连通分支,则将它们的发射功率设为两点间距离(保证能直接通信),并合并两个分支;
步骤 3:重复步骤 2,直到所有节点合并为一个连通分支(网络连通);同时各个节点的功率取其中最大值
步骤 4(优化):在保证连通的前提下,进一步降低单个节点的功率,即第二个阶段:优化节点功率
优化节点功率
在保证网络 k - 连通(课件中 k=1,即普通连通)的前提下,降低单个节点的功率,核心是 “剔除冗余功率”。
收集每个节点的关联链路:对每个节点 u,收集所有包含 u 的节点对(即 u 的邻居链路),并按距离从大到小排序(优先处理远距离链路)。
二分法降低功率:对每个节点 u,尝试降低其功率(从当前值开始),若降低后网络仍连通,则保留新功率;否则停止。
移除冗余链路:优化后,节点 A 和 B 的功率仅为 1,无法维持 (A,B) 链路(距离 2),因此移除 A-B 链路,网络仍通过 C-D 保持连通。
局部最小生成树算法(LMST)
“用局部信息构造最小生成树,以最小功率维持连通”
前提:所有节点已知自身的ID和地理位置信息
目标:连通且能耗小,双向链路,依赖一跳邻居,低节点度
LMST 分为信息采集、拓扑构造、确定发射功率三个步骤,完全由节点独立执行(分布式):
信息采集(Information Exchange)
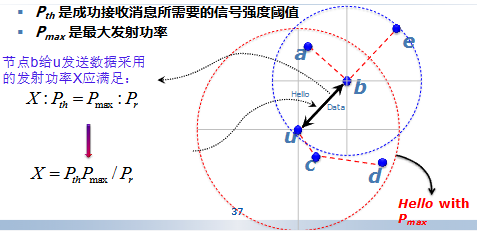
- 每个节点以最大发射功率周期性广播
Hello消息,消息包含自身的 ID 和位置信息; - 节点收集所有 “一跳邻居”(能收到其
Hello的节点)的信息,构造自己的本地拓扑视图(仅包含自身及一跳邻居的连接关系)。
- 每个节点以最大发射功率周期性广播
拓扑构造(Local MST Construction)
边权确定:以 “节点间欧氏距离的r次方(r≥2)” 作为边的权重(权重越大,代表通信功耗越高);
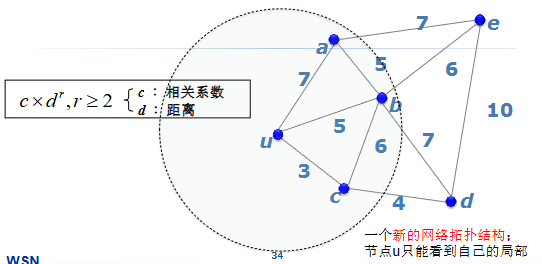
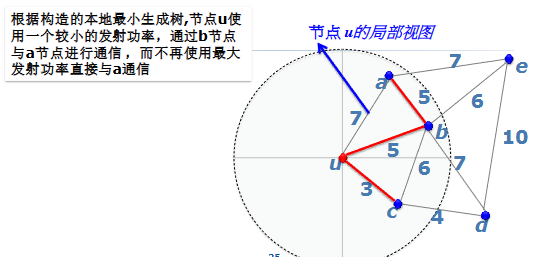
构造局部 MST:每个节点使用Prim 算法(最小生成树算法),在自己的本地拓扑视图中独立构造 “局部最小生成树”;
确定发射功率(Power Adjustment)
通过
Hello消息的接收信号功率,结合自由空间传播模型计算与邻居通信所需的最小发射功率
节点将发射功率设置为 “维持局部 MST 连通所需的最小功率”,而非最大发射功率。
基于邻近图的 WSN 拓扑控制
从 “全连通图” 中按规则筛选必要链路,构建更稀疏但仍保持连通的拓扑
首先所有节点以最大功率发射时,形成的 “全连通拓扑图” 为 G=(V,E):
- V:网络中所有节点的集合(顶点集);
- E:所有节点间 “可直接通信” 的链路集合(边集),边 (u,v) 表示节点 u 和 v 能直接通信。
而邻近图从全连通图 G 中筛选出部分链路得到的子图 G0=(V,E0),核心规则是:对任意节点 v∈V,给定 “邻居判别规则 q”,仅保留 E 中满足 q 的边 (u,v) 作为 E0 的元素。
经典的邻近图模型
- MST(最小生成树)
- RNG(相对邻域图): u,v 之间的 “圆区域” 内无其他节点
- GG(加比图):对边 (u,v),若以 uv 为直径的圆内无其他节点,则保留 (u,v)。
- YG(Yao图):将节点 v 的通信区域划分为 k 个等角扇区,每个扇区内仅保留距离 v 最近的节点对应的边。
基于节点度的 WSN 功率控制
节点度是指 “距离该节点一跳的邻居节点总数”(即能直接与该节点通信的相邻节点数量)。
控制的思想:给定节点度的上限和下限,节点通过周期性动态调整发射功率,使自身的邻居数落在该区间内:
- 邻居数<下限:增大发射功率(扩大通信范围,增加邻居);
- 邻居数>上限:减小发射功率(缩小通信范围,减少邻居);
- 邻居数在区间内:保持功率不变。
典型算法:本地平均算法 Local Mean Algorithm, LMA和本地邻居平均算法 Local Mean of Neighbors algorithm, LMN
- 本地平均算法LMA
适用于无全局位置信息、需动态维持连通性的平面网络
LMA 以 “固定周期” 重复执行以下步骤,每个周期内完成 “邻居统计 - 功率调整” 的闭环
| 步骤 | 操作细节 | 核心目的 |
|---|---|---|
| 1. 广播 LifeMsg | 所有节点以当前发射功率定期广播LifeMsg消息,消息仅包含自身 ID(无额外冗余信息,降低通信开销) |
让邻居节点感知自身存在,为后续邻居统计提供依据 |
| 2. 应答 LifeAckMsg | 若节点收到其他节点的LifeMsg,立即回复LifeAckMsg应答消息,消息中必须包含 “发送LifeMsg的节点 ID” |
告知发送方 “我已感知到你,你是我的邻居”,帮助发送方统计邻居数 |
| 3. 统计邻居数(NodeResp) | 节点在下一次广播LifeMsg前,汇总收到的所有LifeAckMsg,统计不同 ID 的数量,即为当前邻居数NodeResp(每个 ID 仅计数 1 次,避免重复统计) |
获得自身当前的节点度,作为功率调整的判断依据 |
| 4. 动态调整发射功率 | 根据NodeResp与预设 “邻居数上下限” 的关系调整功率:① NodeResp < 下限:增大发射功率(扩大通信范围,增加邻居,避免网络断连);② NodeResp > 上限:减小发射功率(缩小通信范围,减少冗余邻居,降低干扰与能耗);③ NodeResp在区间内:保持功率不变;④ 约束:调整后的功率不得超过硬件的 “最大发射功率上限” 和 “最小发射功率下限” |
使节点度稳定在合理区间,平衡连通性与能耗 |
对于 LMN而言
与 LMN 同属 “基于节点度的功率控制算法”,流程高度相似,核心差异仅在于邻居数(NodeResp)的计算策略
一是LifeAckMsg内容还包括自己的邻居节点数;二是NodeResp 计算方式为收集所有邻居的 “邻居数”,取平均值作为自身的NodeResp(即 “邻居的平均邻居数”)
LMA 的关键参数是 “邻居数上下限”,其设置可参考 F.Xue 和 P.R.Kumar 在 2004 年提出的 “网络连通性临界值”(即 “Magic Number”),该结论基于网络对称(节点通信半径相同、均匀部署)的前提:节点数为n
- 如果邻居节点数小于0.074 log n,则网络趋近非连通
- 如果邻居节点数大于5.1774 log n,则网络趋近连通
分簇式层次型网络的拓扑结构控制
LEACH(Low Energy Adaptive Clustering Hierarchy,低功耗自适应聚类层次算法)
通过动态分簇与簇头轮换,平衡节点能耗、延长网络寿命。
前提:所有传感器节点均可直接与 Sink 节点(数据汇聚中心)通信;节点密集部署;节点初始能量相同,且有限
为了延长整个网络的生命周期以及平衡各节点能耗,LEACH通过定期更换簇头节点,让所有节点公平承担高负载任务(簇头的数据汇聚、融合与转发),避免固定簇头快速耗尽能量。
LEACH 以 “周期” 为单位周期性执行,每个周期包含[1/p]轮(p为簇头百分比),每轮完成一次 “分簇 - 数据传输” 的闭环,且每个节点在一个周期内最多担任一次簇头,保证负载均衡。
- 簇建立阶段:动态选举簇头、形成簇结构、分配通信资源,为数据传输做准备;
- 数据通信阶段:簇内节点上传数据、簇头融合处理、转发至 Sink 节点,完成核心通信任务。
[!tip]
簇头选举(LEACH 核心)
关键参数:
- 簇头百分比p:预设的每轮簇头占总节点数的比例(如 5%~10%),决定簇的数量与规模;
- 选举周期:[1/p]轮,确保每个节点在一个周期内均有机会成为簇头;
- 当前轮数r:标识当前处于哪个选举轮次;
- 未当选节点集合Gr:当前轮次中从未担任过簇头的节点集合(保证轮任公平性);
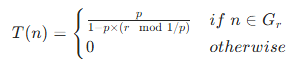
- 阈值T(n):节点成为簇头的判定标准,仅节点随机生成的 0~1 之间的数小于T(n)时,可当选簇头。
其中阈值的计算:
- 若节点
n属于未当选集合Gr:T(n)随轮次动态调整,轮次越靠后,未当选节点的T(n)越大,当选概率越高,保证公平性;- 若节点n已在本周期内当选过簇头:T(n)=0,无法再次当选,避免重复负载。
完整的流程:
- 簇建立阶段(分簇与资源分配)
- 簇头判定:每个节点根据自身是否属于Gr,计算阈值T(n),随机生成 0~1 的数,小于阈值则确定为簇头;
- 簇头公告:簇头节点向周围邻居广播 “簇头公告消息”,告知自身身份;
- 簇加入:非簇头节点根据接收的公告消息信号强弱,选择信号最强的簇头加入,并向该簇头发送 “加入请求”;
- 时间片分配:簇头节点采用 TDMA(时分多址)方式,为簇内每个节点分配专属通信时间片,避免簇内数据传输冲突。
- 数据通信阶段(数据传输与融合)
- 簇内数据上传:簇内节点在各自分配的时间片内,将采集到的感知数据(如温度、湿度)发送给簇头;
- 数据融合:簇头接收所有簇内节点的数据后,进行融合处理(去除冗余信息、提取有效数据),减少传输数据量;
- 数据转发:簇头将融合后的结果一次性转发给 Sink 节点,完成本轮数据传输。
GAF 算法(Geographical Adaptive Fidelity)
GAF 是一种基于节点地理位置的 WSN 分簇拓扑控制算法,核心创新是 “虚拟单元格划分 + 节点休眠机制”,通过精准筛选活动节点(簇头),最大化降低网络能耗
前提:节点位置,检测区域位置,节点通信半径相同,网络密集
GAF 的核心是 “空间复用 + 休眠节能”,通过两步实现:
- 按地理位置划分 “虚拟单元格”:将整个监测区域分割为大小均匀的正方形单元格,确保相邻单元格内的节点可直接通信(避免簇间断连);
- 单元格内动态选举簇头:每个单元格仅保留 1 个活动簇头节点,负责数据采集与转发,其余节点进入低功耗睡眠状态;
- 周期性轮换:簇头定期更换,避免单个节点持续高负载,平衡能耗。
整个过程分为两步:划分虚拟单元格、选举簇头
虚拟单元格划分(确定分簇边界)
- 相邻单元格的对角节点距离最大,需保证该距离≤R,化简后得到边长约束:
r <= R / √5,确保任意两个相邻单元格内的节点能直接通信 - 节点信息广播:所有节点广播包含自身 ID 和位置(POS)的消息,让其他节点知晓其地理位置;
- 单元格归属:节点根据自身位置和单元格边界,确定自己所属的单元格
- 相邻单元格的对角节点距离最大,需保证该距离≤R,化简后得到边长约束:
簇头选举与状态管理(动态维护活动节点)
节点分为三种状态:初始态(启动后的发现态),活动态(工作),睡眠态(节能)
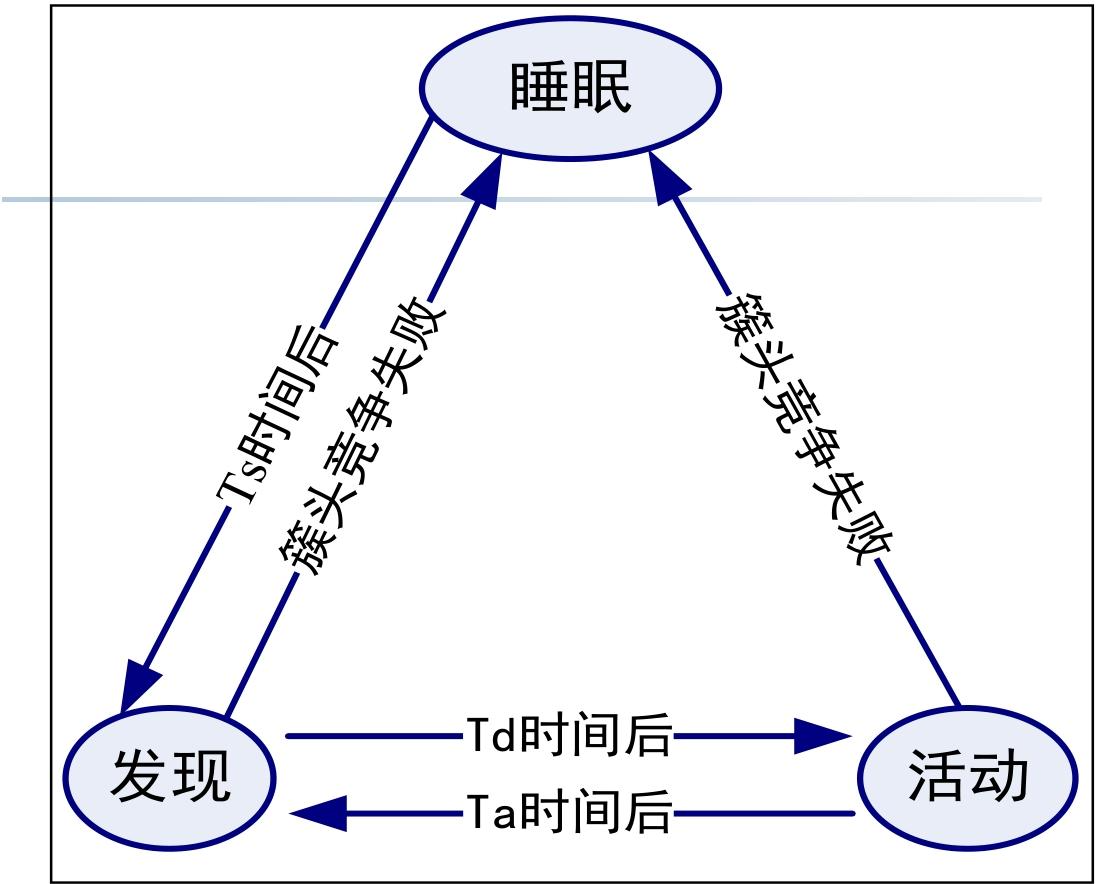
节点周期性唤醒:睡眠状态的节点按固定周期(如 Ta 时间)唤醒,进入 “发现态”;
单元格内信息交换:唤醒后的节点与同单元格内其他节点交换信息(如剩余能量、当前状态);
簇头竞争:根据预设规则(如剩余能量最高、位置最接近单元格中心)选举簇头;
- 竞争成功则成为簇头进入活动态,反之进入睡眠态
GAF 算法的核心价值是 “用地理位置实现精准分簇,用休眠机制最大化节能”,适合节点密集、部署环境平坦、对能耗要求高的 WSN 场景(如农田环境监测、室内传感网络)。
其局限性主要集中在定位依赖和实际环境适应性,后续改进可结合链路质量检测(解决非直视问题)、动态调整单元格大小(适配节点密度)等策略
TopDisc 算法(拓扑发现算法)
从单个监视节点视角,以低通信负载构建整个网络的拓扑结构,适用于网络管理场景。结合 “分簇机制” 与 “高效应答策略”,在密集部署网络中快速完成拓扑发现,同时降低能量消耗。
TopDisc 算法的核心逻辑是 “请求发送 - 请求传播 - 应答反馈”,三步闭环完成拓扑构建
| 步骤 | 操作主体 | 核心动作 | 目标 |
|---|---|---|---|
| 1. 发送拓扑发现请求 | 监视节点(发起节点) | 向网络广播 “拓扑发现请求(TDR)” 消息,启动拓扑发现流程 | 触发全网拓扑信息采集 |
| 2. 传播请求 | 全网活动节点 | 收到 TDR 消息的节点,按规则转发该请求,确保所有活动节点均能接收 | 覆盖全网,不遗漏节点 |
| 3. 应答操作 | 全网活动节点 | 接收 TDR 的节点将自身拓扑信息(如邻居、状态)返回给监视节点,完成信息反馈 | 让监视节点收集完整拓扑数据 |
其中应答方式也有三种:直接应答(转发)、聚集应答(整合)和簇应答(簇头代表)
直接应答(适用于小规模网络)
- 每个节点直接向请求来源节点回复应答消息,中间节点负责转发。
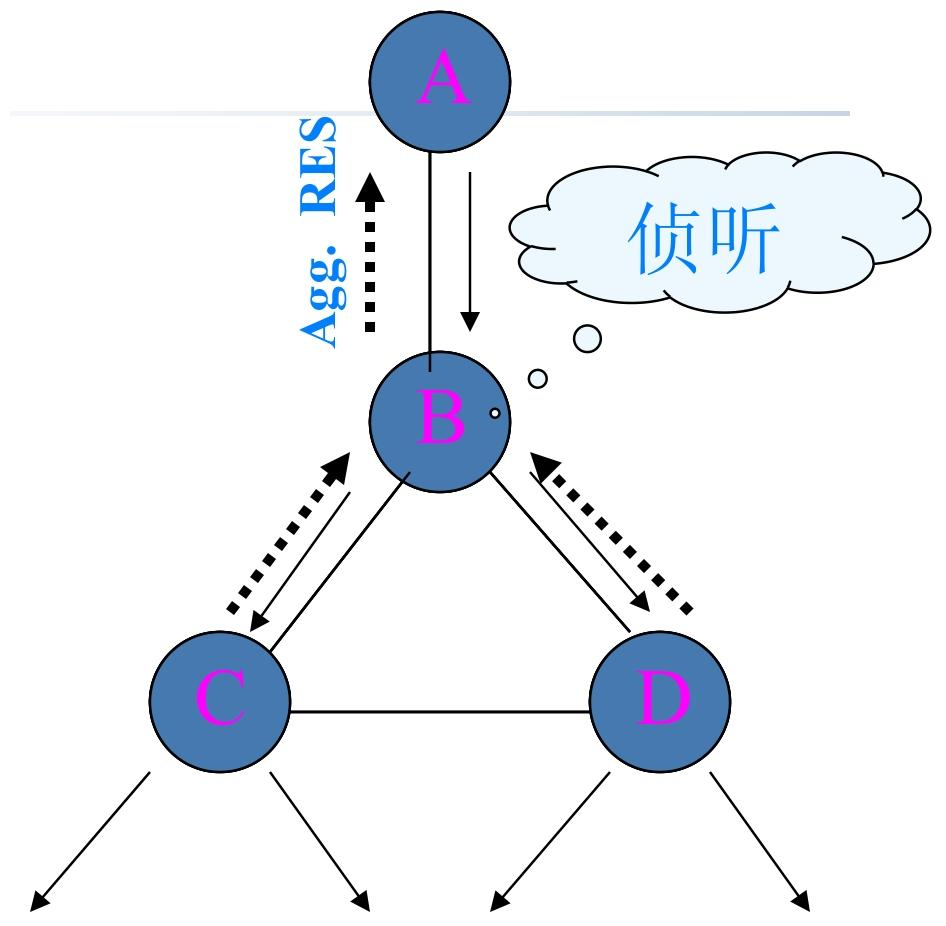
聚集应答(适用于中等规模网络)
中间节点(如潜在簇头)侦听子节点的 TDR 传播,将子节点的应答信息与自身信息 “聚合” 后,统一反馈给上一级节点。
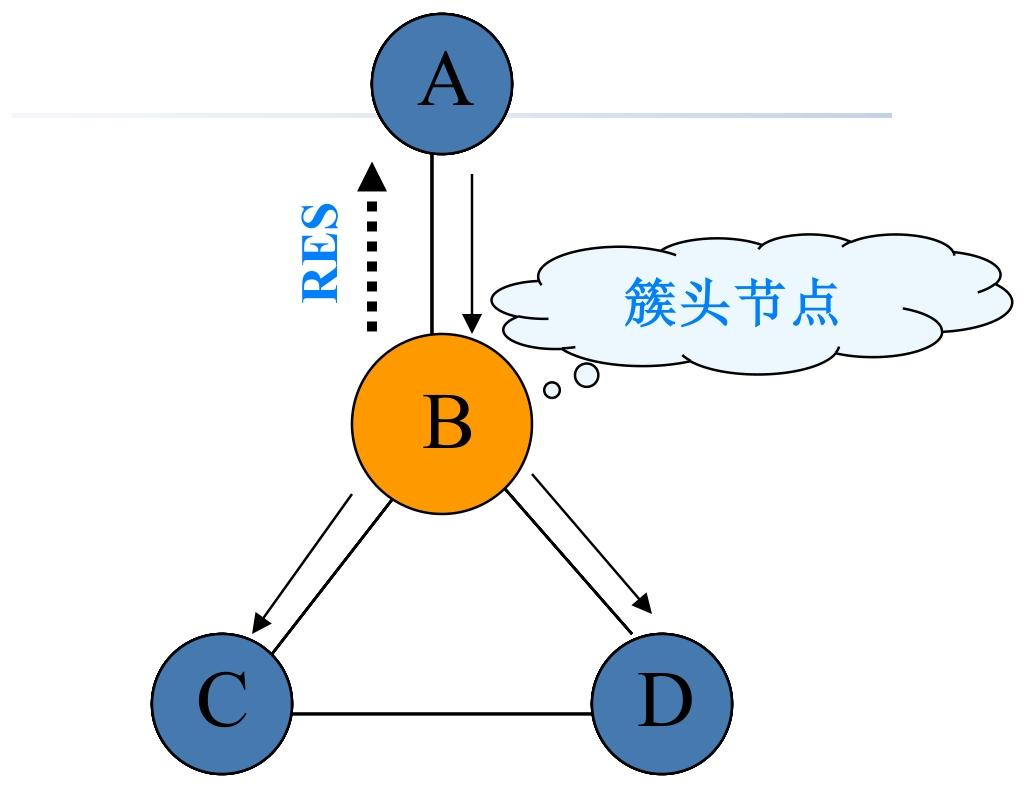
簇应答(适用于分簇网络)
仅簇头节点回复应答,簇内普通节点无需单独应答,由簇头代表簇反馈信息。
[!note]
构建簇的3色算法:TopDisc 通过 “3 色算法” 在请求传播过程中动态形成分簇,为聚集应答、簇应答提供基础,核心是通过 “着色” 区分节点角色(簇头 / 普通节点)
首先进行节点颜色(白黑灰)的定义:
- 白色:未收到 TDR 消息,未被发现的节点;
- 黑色:簇头节点(核心节点,负责聚合信息、转发消息);
- 灰色:被簇头覆盖的普通节点(非簇头,仅转发消息、反馈自身信息给簇头)。
着色核心思想
- 转发延迟与距离成反比:节点收到 TDR 后,等待一段时间再转发,距离发送方越近,等待时间越长;反之则越短。
- 避免近距离节点重复成为簇头,保证簇头分布均匀。
具体过程:
- 初始节点(监视节点)标记为 “黑色”,广播 TDR 消息;
- 白色节点收到黑色节点的 TDR:直接标记为 “灰色”,等待一段时间后转发 TDR;
- 白色节点收到灰色节点的 TDR:先等待一段时间;
- 若等待期间收到黑色节点的 TDR:标记为 “灰色”,转发 TDR;
- 若等待超时未收到黑色节点的 TDR:标记为 “黑色”(成为新簇头),转发 TDR;
- 节点一旦标记为黑色或灰色,不再处理其他节点的 TDR 消息(避免重复着色)。
最后节点都有自己的邻居信息
- 灰色节点:知晓自身邻居信息、对应的簇头节点(邻居黑节点)、转发 TDR 给自己的簇头(父 - 黑色节点);
- 黑色节点:知晓给自己转发 TDR 的灰色节点,可通过该节点转发数据或聚合信息。
响应聚合流程:
- 黑色节点(簇头)标记后,启动 “拓扑请求响应” 定时器;
- 定时器期间,簇头收集所有子节点(灰色节点)的响应信息;定时器超时后,簇头将子节点信息与自身邻居信息聚合,形成完整簇信息,发送给对应的父 - 黑色节点或监视节点;
- 其中定时器设置:距离监视节点越远的黑色节点,定时器值越小;反之则越大。
- 灰色节点仅转发簇头的聚合信息,不单独处理。
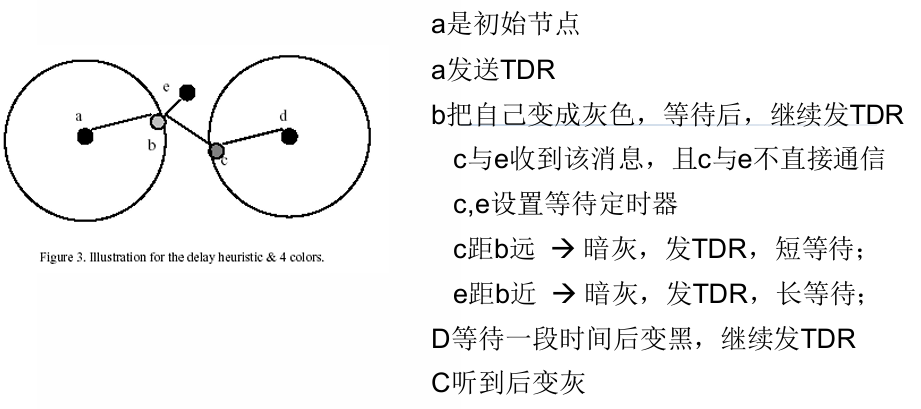
4 色分簇算法(新增暗灰)
更精准地控制簇头分布、避免簇头密集 / 覆盖盲区
简单来说,暗灰节点就是三色分簇算法中白色节点收到灰色节点的 TDR中等待过程的状态,根据等待期间的事件判断最后的颜色
暗灰 :已被发现(收到 TDR),但未被黑色节点直接覆盖(与黑色节点 2 跳距离)的过渡节点,介于白色和灰色之间
其中暗灰的行为:广播 TDR、启动等待定时器,根据定时器结果转换状态(收到黑色TDR->灰色,超时->黑色)