嵌入式内部可编程模块
围绕 S3C2440 的 “存储 - IO - 中断 - 定时 - 通信 - 模数转换” 六大核心模块,都是嵌入式硬件操作的基础,且模块间相互依赖(如 GPIO 需配合中断实现按键响应,DMA 需配合 UART 提升传输效率)
嵌入式开发的核心是 “寄存器配置 + 时序控制”,所有模块操作最终都落实到 “地址映射→寄存器位操作→硬件响应” 的流程;即“功能→寄存器→代码” 的对应关系。
S3C2440
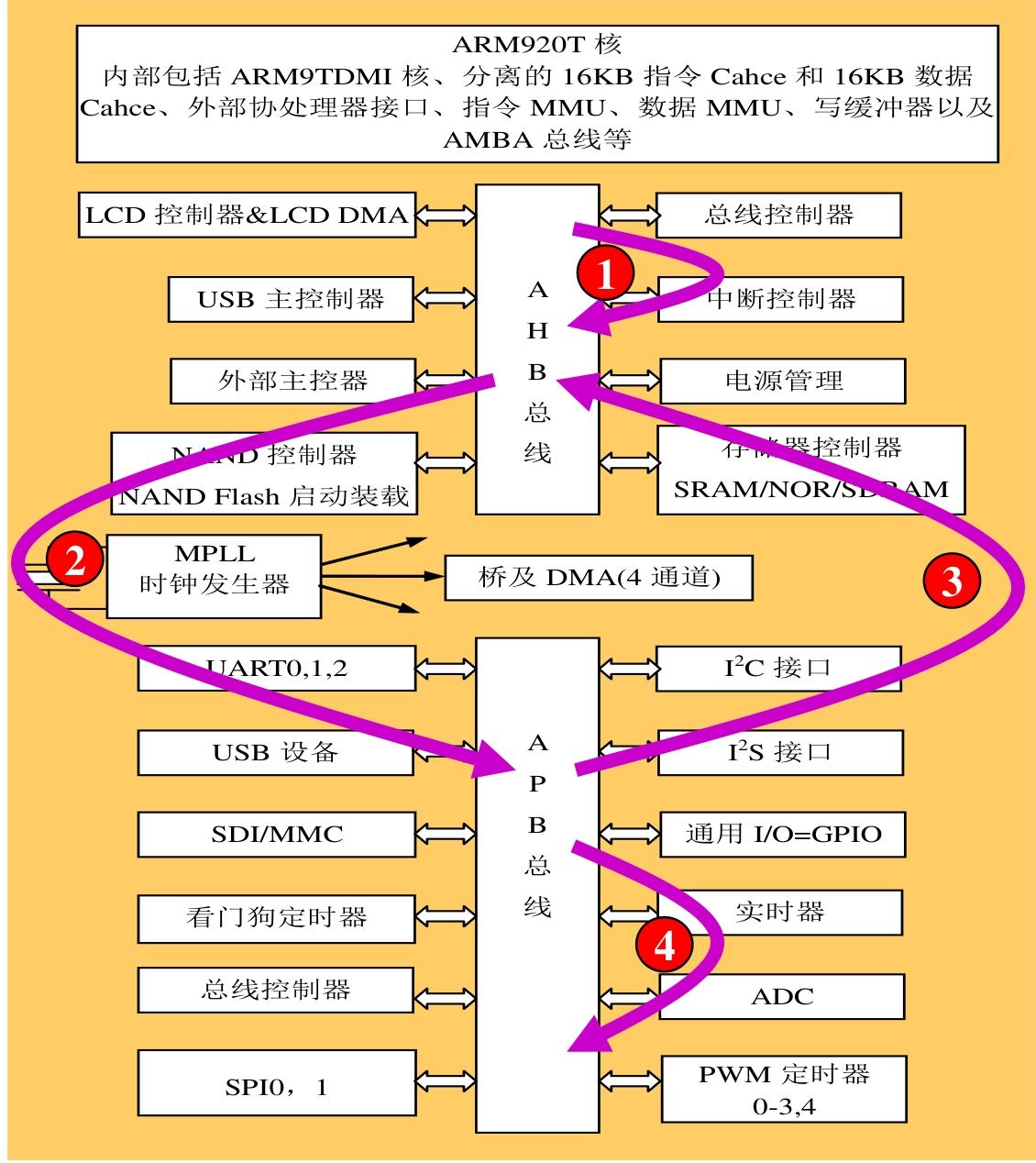
S3C2440 是三星推出的经典 ARM9 架构微处理器
- 基于 ARM920T 内核(RISC 精简指令集),支持 16/32 位指令执行
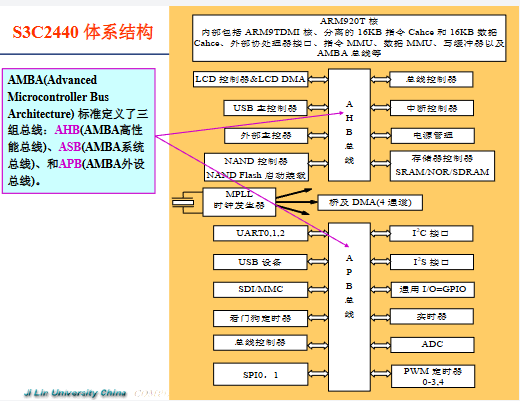
- 采用 AMBA 2.0 总线(AHB 高性能总线 + APB 外设总线 + ASB系统总线)
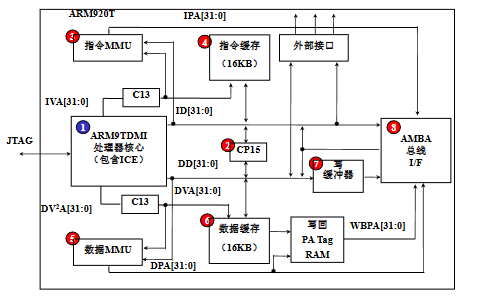
- ARM920T实现了MMU,AMBA总线和哈佛结构高速缓冲体系结构
ARM920内核
S3C2440 体系结构:
- 存储控制:支持 NOR/NAND Flash 启动(内置 4KB 启动缓冲区),8 个存储 Bank(共 1GB 地址空间),兼容 SRAM、SDRAM 等存储器件,支持大小端。
- 显示接口:LCD 控制器支持 STN(最高 4096 色)和 TFT(最高 16M 色)屏幕,适配常见的 320×240、640×480 等分辨率。
- 通信接口:3 路 UART(带 64B FIFO,支持 IrDA 红外通信)、2 路 SPI、1 路 IIC(多主机支持)、1 路 IIS(音频)、2 路 USB 主机 + 1 路 USB 设备(1.1 版)、SD/MMC 卡接口。
- 数据采集与控制:8 通道 10 位 ADC(模数转换,最高 500Kbps)+ 触摸屏接口、4 路 PWM 定时器、看门狗定时器、RTC 实时时钟(带日历 / 闹钟)。
- 扩展能力:130 个通用 I/O 口(支持复用)、24 路外部中断、4 通道 DMA(解放 CPU,提升数据传输效率)、摄像头接口(最高 4096×4096 像素输入)。共60个中断源
存储器控制器
S3C2440 把 “存储控制模块” 集成在芯片内部,相当于给外部所有存储器配了一个 “专属管家”
- 在访问存储单元时,可能采取平板式的地址映射机制对其进行读写,或需要使用虚拟地址对其进行读写。
- ARM处理器中引入了存储管理单元(MMU)来管理存储系统。
| 关键参数 | 含义(通俗解读) | 核心作用 |
|---|---|---|
| 外部存储空间总容量:1GB | S3C2440 能管理的外部存储最大范围,拆成 8 个 “子仓库” | 划定 CPU 可访问的外部存储边界 |
| 8 个 Bank(存储块),每块 128MB | 把 1GB 空间分成 8 个独立区域,用 nGCS7~0 引脚 “点名” 访问(比如 nGCS0 有效 = 访问 Bank0)同时地址地址为0x0000_0000 | 给不同类型存储器 “分配专属地址段”,避免冲突 |
| 大小端模式(软件可选) | 小端:低字节存在低地址(如 0x1234,0x12 在高地址、0x34 在低地址);大端相反 | 适配不同硬件 / 软件的字节存储习惯(嵌入式常用小端) |
| 数据位宽 | Bank0:16/32 位(适配启动类器件,如 NOR Flash);其他 Bank:8/16/32 位 | 匹配不同存储器的 “数据传输宽度”(比如 8 位串口 Flash 用 8 位宽,32 位 SDRAM 用 32 位宽) |
| Bank0-5:接 ROM/SRAM;Bank6-7:接 ROM/SRAM/SDRAM | 不同 Bank 的 “适配器件类型” | SDRAM 需要复杂时序控制,仅 Bank6/7 支持,Bank0-5 适配简单器件(如启动用的 NOR Flash) |
| Bank0-6 起始地址固定,Bank7 可调;Bank6-7 寻址范围可调 | 地址灵活性设计 | Bank7 可适配不同容量的 SDRAM,比如接 128MB 或 256MB SDRAM 时,调整起始地址避免浪费 |
分清 “嵌入式场景下各类存储器的用途差异”
| 存储类型 | 核心特性 | 嵌入式典型用途 | 关键注意点 |
|---|---|---|---|
| ROM/EEPROM/Flash | 只读(EEPROM 可电擦写)、掉电数据不丢 | 存固定程序 / 参数(如早期 bootloader) | 速度慢,仅读 / 少量写 |
| SRAM | 静态、读写快、掉电丢数据 | 嵌入式系统 “高速缓存区”(如 CPU 附近的临时数据) | 成本高,容量小 |
| SDRAM | 同步动态、读写较快、掉电丢数据 | 运行时的内存(如 Linux 系统的内存空间) | 需时钟同步,仅 Bank6/7 支持 |
| NOR Flash | 按 “字” 操作、支持 XIP(片上运行)、可靠 | 启动分区(存 bootloader)、小容量程序存储 | 成本高,容量小,可直接启动 |
| NAND Flash | 按 “块” 操作、容量大、速度快、有坏区 | 存系统镜像、大数据(如 Android 的 userdata 分区) | 不支持 XIP,需 ECC 校验(纠错),启动时要靠 Steppingstone |
| SIMM/DIMM/RIMM/SO-DIMM | 内存模组(内存条)的物理形态 | 区分台式机(DIMM)、笔记本(SO-DIMM)等硬件适配 | 仅硬件选型时关注,编程层面不用管 |
S3C2440 复位后存储器映射:
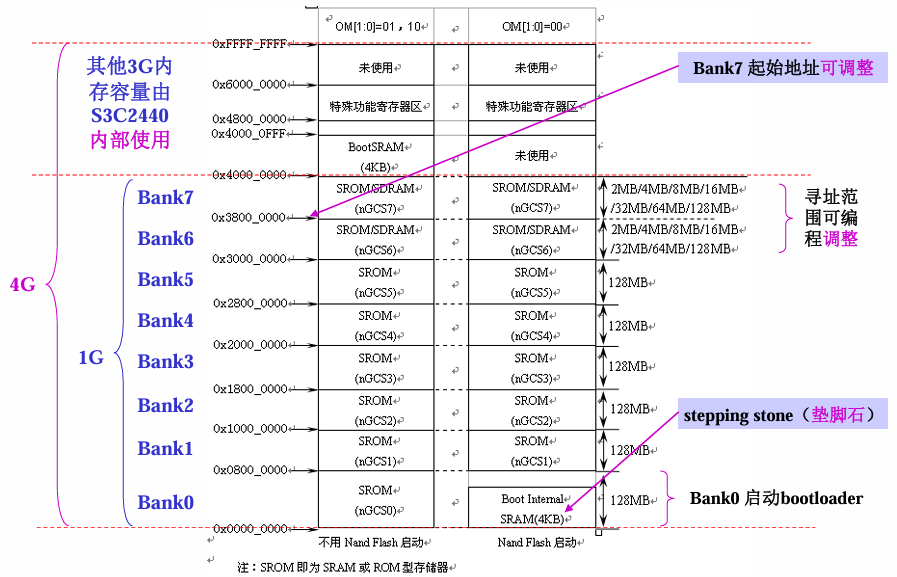
引脚 OM[1:0] 设置
OM [1] 和 OM [0] 是 S3C2440 的硬件引脚(需在硬件设计时接高 / 低电平),直接决定复位后 Bank0 的工作模式

[!tip]
Steppingstone 的作用(NAND 启动的核心)
NAND Flash 的物理特性是 “不能片上运行代码(XIP)”,但成本低、容量大,因此 S3C2440 设计了 4KB 的 Steppingstone(内置 SRAM):
- 当 OM [1:0]=00(NAND 模式)时,复位后硬件自动完成:
- 从 NAND Flash 的起始地址读取前 4KB 的 bootloader 代码;
- 把代码拷贝到 Steppingstone(地址映射为 0x00000000~0x00000FFF);
- CPU 跳转到 0x00000000,执行 Steppingstone 中的代码;
- 这段 4KB 代码的核心任务:初始化 SDRAM,然后把 NAND Flash 中剩余的 bootloader / 内核镜像拷贝到 SDRAM,完成 “接力启动”。
存储器控制器特殊功能寄存器(SFR)
13 个寄存器按功能可分为 5 组,核心对应外部存储的 “总线宽度→时序→刷新→容量→模式”,复位值决定了上电后的默认状态,实操需按需修改:
| 分组 | 寄存器 | 地址 | 核心功能 | 关键特点 |
|---|---|---|---|---|
| 总线宽度控制 | BWSCON | 0x48000000 | 8 个 Bank 的总线宽度 + WAIT 使能 | 每个 Bank 独立配置,是硬件适配的基础 |
| 存储块时序控制 | BANKCON0~BANKCON7 | 0x48000004 起 | 对应 Bank 的访问时序(如地址建立时间) | BANK0~5 适配 ROM/SRAM,BANK6~7 支持 SDRAM |
| SDRAM 刷新控制 | REFRESH | 0x48000024 | SDRAM 刷新模式 / 周期 / 计数值 | 仅 SDRAM 需配置,否则会丢失数据 |
| 容量与省电控制 | BANKSIZE | 0x48000028 | BANK6/7 容量 + 突发操作 + 省电模式 | 决定 SDRAM 的总容量,影响地址映射范围 |
| SDRAM 模式控制 | MRSRB6~MRSRB7 | 0x4800002C 起 | SDRAM 写突发长度 / 测试模式 | 复位值不确定,必须手动配置才能使用 SDRAM |
总线宽度控制寄存器 BWSCON(0x48000000)
告诉 CPU“每个 Bank 的存储器是 8/16/32 位宽”,以及是否启用 WAIT 等待信号(适配低速存储器)。
- 寄存器结构:每个 Bank 占 4 位(STn+WSn+DWn),共 32 位覆盖 Bank7~0(Reserved [0] 保留为 0)。
- 关键位含义(以 Bank7 为例,其他 Bank 同理):
- ST7(bit31):是否使用 UB/LB(高 / 低字节控制),0 = 用 nWBE 引脚,1 = 用 nBE 引脚(SRAM 常用);
- WS7(bit30):WAIT 信号使能,0 = 不启用,1 = 启用(低速存储器需启用,避免数据出错);
- DW7(bit29~28):总线宽度,00=8bit、01=16bit、10=32bit(必须与硬件接线一致)。
- 实操示例:Bank0 接 16 位 NOR Flash,配置为 “16bit 宽度 + 不启用 WAIT”→ BWSCON 的 DW0=01(bit5~4)、WS0=0(bit6)。
存储块控制寄存器 BANKCONn(0x48000004 起)
配置每个 Bank 的访问时序(如地址建立时间、访问周期),时序不匹配会导致读写出错。
SDRAM 刷新控制寄存器 REFRESH(0x48000024)
SDRAM 是动态存储器,需定期刷新才能保留数据,此寄存器配置刷新规则(ROM/SRAM 无需配置)。比如设置刷新模式、刷新周期、刷新计数值。
存储块大小控制寄存器 BANKSIZE(0x48000028)
配置 BANK6/7 的 SDRAM 容量,以及 CPU 突发操作、SDRAM 省电模式。
SDRAM 模式寄存器 MRSRB6~MRSRB7(0x4800002C/30)
配置 SDRAM 的工作模式(如写突发长度),复位值不确定,必须手动配置。
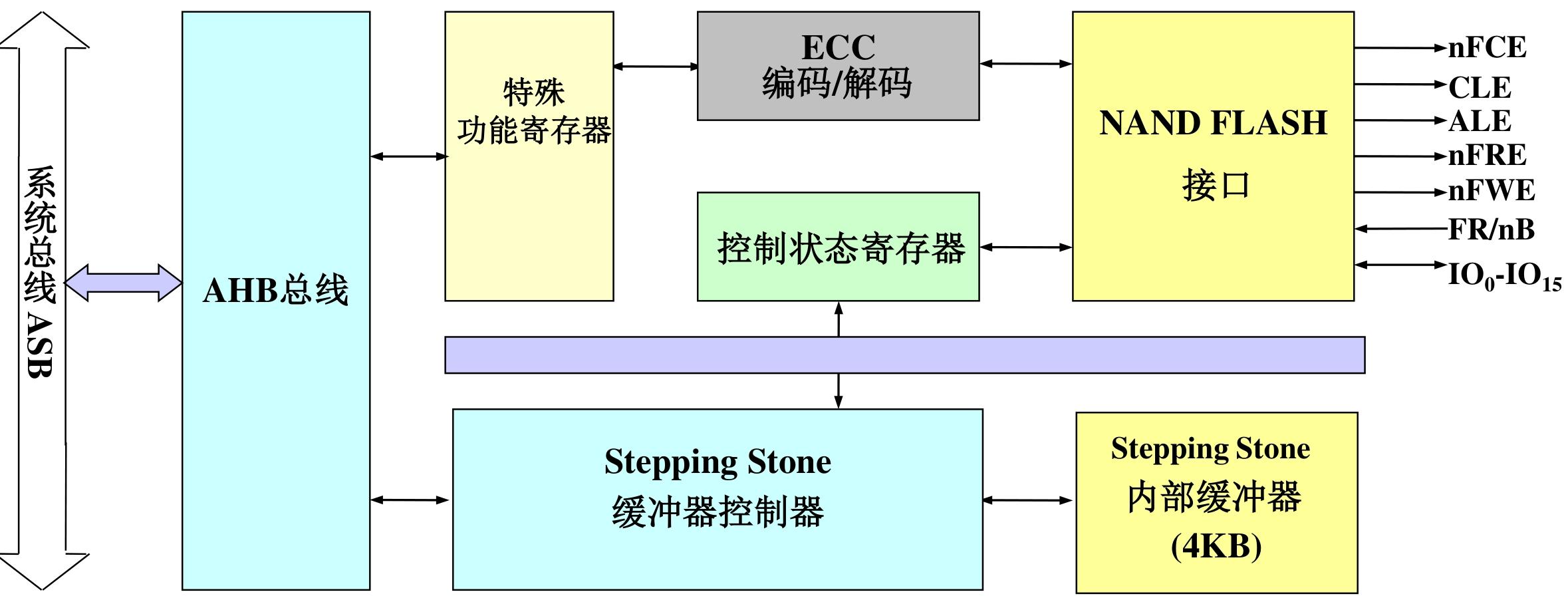
NAND Flash 控制器
S3C2440 的 NAND Flash 控制器是 “低成本大容量存储方案” 的核心,核心解决 “NAND Flash 不能直接运行代码(无 XIP)” 的问题,通过内置缓冲 + 专用时序 / 寄存器,实现启动加载、数据读写和错误校验
NOR vs NAND 核心差异(决定控制器设计)
| 关键差异点 | NOR Flash | NAND Flash | 控制器要解决的问题 |
|---|---|---|---|
| 核心能力 | 支持 XIP(片上运行代码) | 不支持 XIP(仅顺序访问) | 需通过 Steppingstone 缓冲启动代码 |
| 容量与价格 | 小(1MB~32MB)、价高 | 大(16MB~512MB)、价低 | 适配大容量存储的地址 / 命令时序 |
| 可靠性 | 位反转少 | 位反转常见 | 内置 ECC 硬件校验纠错 |
| 接口与速度 | 同 RAM 接口、擦写慢 | I/O 复用接口、擦写快 | 提供专用命令 / 地址 / 数据时序 |
- 实现 NAND Flash 启动:通过 Steppingstone 缓冲(4KB 内置 SRAM 缓冲器),让系统能从低成本 NAND Flash 启动;
- NAND Flash有2种工作模式:自动启动模式、 NAND Flash模式。
- 自动启动模式:重启时自动将NAND Flash上的启动代码加载到 4KB的Steppingstone上,然后代码在Steppingstone上执行。
- NAND Flash模式(软件模式):作为一般性存储器,可读可写
- 启动前硬件引脚配置(OM+GPG 引脚)
| 引脚组合 | 配置功能 |
|---|---|
| OM[1:0] = 00 | 使能 NAND Flash 启动模式(必设) |
| NCON | 选择 NAND 类型:0 = 普通(256/512 字节页),1 = 高级(1K/2K 字节页) |
| GPG13 | 页容量选择:配合 NCON,0=256/1K 字节,1=512/2K 字节 |
| GPG14 | 地址周期选择:配合 NCON,0=3/4 个周期,1=4/5 个周期 |
| GPG15 | 总线宽度选择:0=8 位,1=16 位(需与 NAND 芯片匹配) |
时序配置(NFCONF 寄存器)
核心时序参数(控制信号同步,避免读写错误):
- TACLS:CLE/ALE 信号持续时间 = HCLK × TACLS(0~3 可选);
- TWRPH0:nWE/nRE 信号持续时间 = HCLK × (TWRPH0+1)(0~7 可选);
- TWRPH1:数据有效时间 = HCLK × (TWRPH1+1)(0~7 可选);
- 示例:HCLK=100MHz(周期 10ns),设 TACLS=1(10ns)、TWRPH0=0(10ns)、TWRPH1=0(10ns),适配大多数 NAND 芯片。
GPIO
GPIO: General Purpose I/O ports,通用输入/输出,即ARM芯片中称为输 入输出端口。
GPIO 就是芯片上的 “通用电引脚”—— 你可以通过代码控制这些引脚输出高电平(比如 3.3V)或低电平(0V),也能读取外部设备加到引脚上的电平(比如按键按下是低电平、松开是高电平)。
S3C2440的GPIO:130个,分为9组,GPA ~ GPJ,这9组GPIO端口均为多功能端口,端口功能可以编程设置
“先配置,后使用” 是铁律
所有 GPIO 引脚默认可能不是 “普通输入 / 输出” 功能(比如 GPA 组默认是地址总线),必须在程序一开始(主程序运行前)配置对应的 “控制寄存器”(比如 GPFCON、GPGCON),选定你需要的功能(比如普通 IO、中断、UART 等),否则引脚不会按预期工作。
“不用特殊功能,就当普通 IO”:
如果一个引脚你不用来做 UART、中断、LCD 等特殊功能,就可以把它设为 “普通输入 / 输出”,和 51 单片机的 IO 口完全一样用。
分组的意义
9 组 GPIO(GPA~GPJ)不是随便分的,每组有 “主打功能”:
- GPA:地址总线 / 片选信号(主要输出并且只能作为输出口,几乎不用作普通 IO);
- GPF/GPG:支持外部中断(常用作按键中断、传感器中断);
- GPC/GPD:LCD 接口(接显示屏的行 / 列驱动);
- GPH:UART/USB 等通信接口;
- GPJ:摄像头接口;
分组的目的是让硬件接线更规整,比如接 LCD 就优先用 GPC/GPD,接按键中断就优先用 GPF/GPG。
GPIO(GPA~GPJ)的完整功能
- 功能 1(兜底):所有引脚默认支持「普通输入 / 输出」(和 51 单片机 IO 口一样,控电平、读信号);
- 功能 2/3(专用):为特定外设设计的 “专属接口”(如 LCD、UART、中断),是嵌入式开发的核心配置;
- 排他性:一个引脚同一时间只能选一种功能(比如 GPD8 要么当普通 IO,要么当 LCD 的 VD16,要么当 SPI 的 SPIMISO1)。
通过每组端口的「控制寄存器」(如 GPACON、GPBCON)配置 “功能选择位”(每引脚占 2~4 位),锁定所需功能。
端口A~J的引脚功能
端口 A(GPA):系统底层控制专用(23 引脚)
普通输出口(仅能输出高低电平)
① NAND Flash 控制:GPA17=CLE(命令锁存)、GPA18=ALE(地址锁存)、GPA19=nFWE(写允许)、GPA20=nFRE(读允许)、GPA22=nFCE(片选);
② 地址总线:GPA0~11=ADDR0、ADDR16~26(外部存储地址);12位
③ Bank 片选:GPA12~16=nGCS1~5(外部存储 Bank1~5 选择)
端口 B(GPB):DMA / 定时器专属(11 引脚)
普通输入 / 输出(无限制)
① DMA 请求 / 响应:GPB5~10=nXBACK/nXBREQ/nXDACK0/1/nXDREQ0/1(DMA 传输的触发 / 应答信号);
② 定时器输出:GPB0~3=TOUT0~3(PWM 波形输出)、GPB4=TCLK0(定时器时钟)
端口 C(GPC):LCD 控制 + 低 8 位数据(16 引脚)
普通输入 / 输出
① LCD 控制信号:GPC0=LEND、GPC1=VCLK(像素时钟)、GPC2=VLINE(行同步)、GPC3=VFRAME(场同步)等;
② LCD 数据:GPC8~15=VD0~VD7(LCD 低 8 位像素数据)
端口 D(GPD):LCD 高 16 位数据 + SPI 复用(16 引脚)
- 普通输入 / 输出
- LCD 高 16 位数据:GPD0~15=VD8~23(和 GPC 的 VD0~7 组成 24 位 LCD 数据)
- PI1 接口:GPD8=SPIMISO1、GPD9=SPIMOSI1、GPD10=SPICLK1;SPI 片选:GPD14=nSS1、GPD15=nSS0
端口 E(GPE):通信外设 “一站式”(16 引脚)
普通输入 / 输出
① SPI0:GPE11=SPIMISO0、GPE12=SPIMOSI0、GPE13=SPICLK0;
② SD 卡:GPE5=SDCLK、GPE6=SDCMD、GPE7~10=SDDAT0~3;
③ IIC:GPE14=IICSCL、GPE15=IICSDA;
④ IIS 音频:GPE0=I2SLRCK、GPE1=I2SSCLK、GPE2=CDCLK、GPE3=I2SSDI、GPE4=I2SSDO
AC97 音频:GPE0=AC_SYNC、GPE1=AC_BIT_CLK、GPE2=AC_nRESET、GPE3=AC_SDATA_IN、GPE4=AC_SDATA_OUT
端口 F(GPF):核心外部中断(8 引脚)
- 普通输入 / 输出
- 外部中断 EINT0~7:GPF0=EINT0、GPF1=EINT1…GPF7=EINT7
端口 G(GPG):扩展外部中断 + UART/SPI(16 引脚)
- 普通输入 / 输出
- 外部中断 EINT8~23:GPG0=EINT8、GPG1=EINT9…GPG15=EINT23(GPG4 额外支持 LCD_PWREN,LCD 电源控制)
- UART1 流控:GPG9=nRTS1、GPG10=nCTS1、GPG11=TCLK1;SPI1:GPG5=SPIMISO1、GPG6=SPIMOSI1、GPG7=SPICLK1
端口 H(GPH):UART 通信 + 时钟输出(11 引脚)
普通输入 / 输出
① UART 通信:GPH2=TXD0、GPH3=RXD0(UART0,调试首选);GPH4=TXD1、GPH5=RXD1(UART1);GPH6=TXD2、GPH7=RXD2(UART2);
② 时钟输出:GPH8=UEXTCLK、GPH9=CLKOUT0、GPH10=CLKOUT1
UART 流控:GPH0=nCTS0、GPH1=nRTS0(UART0);GPH6=nRTS1、GPH7=nCTS1(UART2)
端口 J(GPJ):摄像头接口专用(13 引脚)
普通输入 / 输出
摄像头全套接口:
① 数据:GPJ0~7=CAMDATA0~7;
② 控制:GPJ8=CAMPCLK(像素时钟)、GPJ9=CAMVSYNC(场同步)、GPJ10=CAMHREF(行同步)、GPJ11=CAMCLKOUT(摄像头时钟)、GPJ12=CAMRESET(摄像头复位)
[!note]
- 系统底层(启动 / NAND)→ 找 GPA;
- LCD 显示 → 找 GPC+GPD;
- UART 调试 → 找 GPH(优先 GPH2/3=UART0);
- 中断 → 核心中断找 GPF,扩展中断找 GPG;
- 通信外设(SD/IIC/SPI)→ 找 GPE;
- 摄像头 → 找 GPJ;
- DMA / 定时器 → 找 GPB;
- 普通 IO(LED / 按键)→ 优先用未被专用功能占用的 GPB/GPE/GPG 引脚。
端口配置寄存器
- 通过编程设置端口控制寄存器,以决定使用每个I/O引脚的哪种功能
- I/O端口的状态(如输入/输出、数据线是否挂起),用户也需要通过编程设置控制寄存器来确定
S3C2440有9个端口,每个端口一般对应3个寄存器(端口A只有2个):
| 寄存器类型 | 核心作用 | 通用操作逻辑 |
|---|---|---|
| 控制寄存器(*CON) | 定义引脚功能(输入 / 输出 / 专用外设功能) | 可读可写,通过特定位配置,不同端口位宽(1 位 / 2 位)对应不同功能选择 |
| 数据寄存器(*DAT) | 存储引脚输入 / 输出电平数据 | 可读可写,1 位对应 1 个引脚,1 = 高电平,0 = 低电平 |
| 上拉电阻寄存器(*UP) | 控制引脚是否启用内部上拉电阻 | 可读可写,1 位对应 1 个引脚,1 = 禁用上拉,0 = 启用上拉(GPA 无此寄存器) |
- 端口 A(GPA):无内部上拉,侧重系统控制
| 寄存器 | 地址 | 复位值 | 核心细节 |
|---|---|---|---|
| GPACON(控制) | 0x56000000 | 0x7FFFFF | 每引脚 1 位控制,仅 2 种功能(0 = 普通输出,1 = 专用功能:地址总线 / NAND 控制);GPA 仅支持输出,无输入功能 |
| GPADAT(数据) | 0x56000004 | 不确定 | 位 [22:0] 存储端口数据,仅用于输出操作 |
- 端口 B(GPB):支持 DMA / 定时器功能
| 寄存器 | 地址 | 复位值 | 核心细节 |
|---|---|---|---|
| GPBCON(控制) | 0x56000010 | 0x000000 | 每引脚 2 位控制,4 种选择(00 = 输入,01 = 输出,10=DMA / 定时器功能,11 = 保留) |
| GPBDAT(数据) | 0x56000014 | 不确定 | 位 [10:0] 存储 11 个引脚数据,输入时读、输出时写 |
| GPBUP(上拉) | 0x56000018 | 0x000 | 位 [10:0] 控制对应引脚上拉,默认启用上拉 |
- 端口 C(GPC):LCD 接口专用
| 寄存器 | 地址 | 复位值 | 核心细节 |
|---|---|---|---|
| GPCCON(控制) | 0x56000020 | 0x000000 | 每引脚 2 位控制,4 种选择(00 = 输入,01 = 输出,10=LCD 控制信号 / VD0~VD7,11 = 保留) |
| GPCDAT(数据) | 0x56000024 | 不确定 | 位 [15:0] 存储 16 个引脚数据,适配 LCD 数据传输 |
| GPCUP(上拉) | 0x56000028 | 0x0000 | 位 [15:0] 控制上拉,默认启用 |
- 端口 D(GPD):LCD 高 16 位数据 + SPI 复用
| 寄存器 | 地址 | 复位值 | 核心细节 |
|---|---|---|---|
| GPDCON(控制) | 0x56000030 | 0x000000 | 每引脚 2 位控制,4 种选择(00 = 输入,01 = 输出,10=VD8~VD23,11=SPI 片选 /nSS0,仅 GPD15 支持) |
| GPDDAT(数据) | 0x56000034 | 不确定 | 位 [15:0] 存储 16 个引脚数据,兼顾 LCD 和普通 IO 需求 |
| GPDUP(上拉) | 0x56000038 | 0x0000 | 位 [15:0] 控制上拉,默认启用 |
- 端口 E(GPE):多通信外设集中区
| 寄存器 | 地址 | 复位值 | 核心细节 |
|---|---|---|---|
| GPECON(控制) | 0x56000040 | 0x000000 | 每引脚 2 位控制,4 种选择(00 = 输入,01 = 输出,10=SPI/SD 卡 / IIC/IIS,11=AC97 音频功能);GPE14~15 为无上拉漏极开路 |
| GPEDAT(数据) | 0x56000044 | 不确定 | 位 [15:0] 存储 16 个引脚数据,适配多种通信外设数据传输 |
| GPEUP(上拉) | 0x56000048 | 0x0000 | 位 [15:0] 控制上拉,默认启用(GPE14~15 无内部上拉) |
- 端口 F(GPF):核心外部中断源
| 寄存器 | 地址 | 复位值 | 核心细节 |
|---|---|---|---|
| GPFCON(控制) | 0x56000050 | 0x000000 | 每引脚 2 位控制,4 种选择(00 = 输入,01 = 输出,10=EINT0~EINT7 中断,11 = 保留) |
| GPFDAT(数据) | 0x56000054 | 不确定 | 位 [7:0] 存储 8 个引脚数据,中断场景中可读取触发电平 |
| GPFUP(上拉) | 0x56000058 | 0x00 | 位 [7:0] 控制上拉,中断引脚建议禁用上拉 |
- 端口 G(GPG):扩展中断 + UART/SPI 复用
| 寄存器 | 地址 | 复位值 | 核心细节 |
|---|---|---|---|
| GPGCON(控制) | 0x56000060 | 0x00000000 | 每引脚 2 位控制,4 种选择(00 = 输入,01 = 输出,10=EINT8~EINT23 中断,11=UART1/SPI1 功能) |
| GPGDAT(数据) | 0x56000064 | 不确定 | 位 [15:0] 存储 16 个引脚数据,兼顾中断和通信功能 |
| GPGUP(上拉) | 0x56000068 | 0xF800 | 位 [15:0] 控制上拉,默认高 8 位禁用上拉(0xF800),低 8 位启用 |
- 端口 H(GPH):UART 通信 + 时钟输出
| 寄存器 | 地址 | 复位值 | 核心细节 |
|---|---|---|---|
| GPHCON(控制) | 0x56000070 | 0x00000000 | 每引脚 2 位控制,4 种选择(00 = 输入,01 = 输出,10=UART0~UART2 / 时钟输出,11=UART 流控) |
| GPHDAT(数据) | 0x56000074 | 不确定 | 位 [10:0] 存储 11 个引脚数据,UART 调试核心端口 |
| GPHUP(上拉) | 0x56000078 | 0x000 | 位 [10:0] 控制上拉,默认启用 |
- 端口 J(GPJ):摄像头接口专用
| 寄存器 | 地址 | 复位值 | 核心细节 |
|---|---|---|---|
| GPJCON(控制) | 0x560000D0 | 0x00000000 | 每引脚 2 位控制,4 种选择(00 = 输入,01 = 输出,10 = 摄像头数据 / 控制信号,11 = 保留) |
| GPJDAT(数据) | 0x560000D4 | 不确定 | 位 [12:0] 存储 13 个引脚数据,适配摄像头数据采集 |
| GPJUP(上拉) | 0x560000D8 | 0x000 | 位 [12:0] 控制上拉,默认启用 |
[!note]
- 地址规律:每组端口寄存器地址连续,间隔 4 字节(如 ***CON→***DAT→*UP 依次递增 4 字节);同时GPA的起始地址为0x5600_0000,GPB为0x5600_0010,即每个端口的寄存器地址相差
0x10**- 复位值特点:控制寄存器复位值多为 0x000000(GPA 为 0x7FFFFF),数据寄存器复位值均不确定,上拉寄存器复位值多为 0x000(GPG 为 0xF800);
- 配置顺序:必须先通过***CON 配置引脚功能,再用\*DAT 读写数据,最后按需配置 *UP 控制上拉,顺序错误会导致功能失效;
- 功能冲突规避:同一引脚同一时间仅能选择一种功能,需提前规划引脚用途,避免复用冲突。
GPIO 其他寄存器
多控制寄存器(MISCCR):全局功能综合控制
统筹 USB 模式、时钟输出、电池保护、数据线拉电阻等全局功能,是跨外设的基础控制寄存器。
DCLK 控制寄存器(DCLKCON):外部时钟精准调控
专门控制外部源时钟 DCLK0 和 DCLK1 的使能、分频、占空比,适配需要精准时钟的外设。
外部中断控制寄存器(EXTINT0~EXTINT2):中断触发方式配置
共有3个,分别为EXTINT0、EXTINT1、EXTINT2。对24个外部中断请求信号( EINT0 ~EINT23)的有效触发方式进 行选择。 EXTINT0地址=0x56000088 ,复位值=0x00000000,可读可写。 EXTINT1地址=0x5600008c ,复位值=0x00000000,可读可写。 EXTINT2地址=0x56000090 ,复位值=0x00000000,可读可写
每 3 位控制一个中断,支持 5 种模式(000 = 低电平、001 = 高电平、01×= 下降沿、10×= 上升沿、11×= 边沿触发)
滤波器使能:EXTINT1~EXTINT2 含 FLTENx 位(1 = 使能滤波器,0 = 不使能),配合 EINTFLTn 实现防抖
外部中断过滤寄存器(EINTFLT0~EINTFLT3):中断防抖控制
过滤外部中断引脚的抖动信号,确保中断触发稳定(有效电平需保持≥40ns)。
外部中断屏蔽 / 未决寄存器(EINTMSK/EINTPND):中断状态管理
控制外部中断的屏蔽与否,并记录中断请求状态,是中断响应的 “开关” 与 “状态指示器”。
- EINTMSK:位 [4:23] 对应 EINT4~EINT23,0 = 不屏蔽(允许中断),1 = 屏蔽;位 [0:3] 保留。
- EINTPND:位 [4:23] 对应 EINT4~EINT23,1 = 有中断请求(未处理),0 = 无请求;需手动写 1 清除未决状态。
通用状态寄存器(GSTATUS0~GSTATUS4):系统状态监测
读取外部引脚状态、芯片标识、复位原因,保存关键数据,是系统诊断的重要依据。
- GSTATUS0(0x560000AC):只读,反映 nWAIT/NCON/RnB/BATT_FLT 引脚实时状态;
- GSTATUS1(0x560000B0):只读,芯片 ID 复位值 0x32440001(S3C2440 标识);
- GSTATUS2(0x560000B4):可读可写,记录复位原因(WDTRST = 看门狗复位、SLEEPRST = 节能复位、PWRST = 上电复位);
- GSTATUS3~4(0x560000B8/BC):可读可写,上电复位清空,否则保存数据(可被 nRESET 或看门狗清 0)。
驱动能力控制寄存器(DSC0~DSC1):I/O 驱动强度调节
配置地址线、数据线、控制线的驱动电流,避免因驱动不足导致的信号不稳定。
内存休眠控制寄存器(MSLCON):休眠模式引脚状态配置
定义系统休眠时,存储器接口相关引脚的状态(高阻、闲置、输出 0),保护外设与内存。
I/O应用实例
[!important]
GPIO 的配置与使用核心遵循 “功能定义→辅助配置→数据读写” 的固定流程,
首先在进行一下配置前需要明确配置的端口,从而确定端口各个寄存器的地址用于绑定
- 定义寄存器时添加
volatile关键字(如#define rGPFCON (*(volatile unsigned *)0x56000050)),禁止编译器优化,确保每次读写都是实际操作硬件寄存器。
1. 引脚功能配置(核心第一步)
- 控制寄存器(*CON),如 GPFCON(地址 0x56000050)。
- 明确引脚是 “输入 / 输出” 还是 “专用功能(如中断、通信接口)”,避免功能冲突。
- 采用 “先清后置” 的位操作逻辑:先通过 “&= 掩码” 清除目标引脚原有配置(不影响其他引脚),再通过 “|= 配置值” 设定目标功能。
2. 辅助配置(上拉 / 下拉电阻)
- 操作对象:上拉电阻寄存器(*UP),如 GPFUP(地址 0x56000058)。
- 核心目的:避免输入引脚电平漂浮,或增强输出引脚驱动稳定性(上拉电阻使引脚默认高电平,下拉电阻默认低电平,S3C2440 仅内置上拉)。
- 实操要点
- 位操作精准控制:1 = 禁用上拉,0 = 启用上拉,无需改动的引脚通过掩码保留原有状态。
- 示例(GPF6~GPF3 启用上拉):
rGPFUP &= 0x87;(0x87=10000111,仅将 GPF6~GPF3 位清 0 启用上拉,其他位不变)。
- 输出引脚建议启用上拉(增强驱动),中断引脚按需禁用上拉(避免干扰触发信号)。
3. 数据读写(功能实现核心)
- 数据寄存器(*DAT),如 GPFDAT(地址 0x56000054)。
- 输出模式时写入电平(控制外设),输入模式时读取电平(获取外设状态)。
- 输出操作:直接写入对应值,1 = 高电平,0 = 低电平(如 LED 亮 = 引脚低电平,
rGPFDAT=0xF7对应 GPF3 低电平,LED1 亮)。 - 输入操作:直接读取寄存器值,通过位掩码提取目标引脚状态(如
Var = rGPFDAT & 0x08;读取 GPF3 电平)。
- 输出操作:直接写入对应值,1 = 高电平,0 = 低电平(如 LED 亮 = 引脚低电平,
- 数据规律:多个引脚控制时,可定义数组存储对应电平组合(如 LED 流水灯数组
ledtab[]={0xf7,0xef,0xdf,0xbf},依次对应 4 个 LED 单独点亮的电平配置)。
// 1. 定义GPIO寄存器地址(根据芯片手册修改)
#define rGPIO_CON (*(volatile unsigned *)0xXXXXXXX) // 控制寄存器地址
#define rGPIO_DAT (*(volatile unsigned *)0xXXXXXXX) // 数据寄存器地址
#define rGPIO_UP (*(volatile unsigned *)0xXXXXXXX) // 上拉寄存器地址
// 2. 延时函数(按需调整时长)
void Delay(unsigned int x) {
unsigned int i,j,k;
for(i=0;i<=x;i++) for(j=0;j<=0xff;j++) for(k=0;k<=0xff;k++);
}
// 3. GPIO初始化(功能+上拉配置)
void GPIO_Init() {
// 步骤1:配置目标引脚为输出/输入
rGPIO_CON &= 0xXXXX; // 清除原有配置(掩码根据引脚位置计算)
rGPIO_CON |= 0xXXXX; // 设定目标功能(01=输出,00=输入)
// 步骤2:配置上拉电阻
rGPIO_UP &= 0xXXXX; // 启用/禁用目标引脚上拉(0=启用,1=禁用)
}
// 4. 外设控制(数据读写)
void GPIO_Control() {
while(1) {
rGPIO_DAT = 0xXX; // 写入电平(控制外设状态,如LED亮)
Delay(100); // 维持状态
rGPIO_DAT = 0xXX; // 切换电平(如LED灭)
Delay(100);
}
}
中断系统
S3C2440 的中断系统是芯片响应 “异步事件”(如外设请求、外部信号触发)的核心机制,本质是让 CPU 暂停当前任务,优先处理紧急事件,处理完后再回到原任务。
S3C2440 内置中断控制器,专门管理 60 个中断源,核心作用是统一协调所有中断请求
- 区分并响应两种中断请求:FIQ(快速中断请求)和IRQ(普通中断请求)
- IRQ可以被FIQ中断,但IRQ不能中断FIQ
CPU 的程序状态寄存器(CPSR) 中专门有两位控制中断响应,相当于中断的 “全局开关”:
- F 位(FIQ 屏蔽位);I 位(IRQ 屏蔽位):1屏蔽,0允许
注:系统启动时默认 I=1、F=1(屏蔽所有中断),需在程序中手动置 0 开启对应中断。
中断源
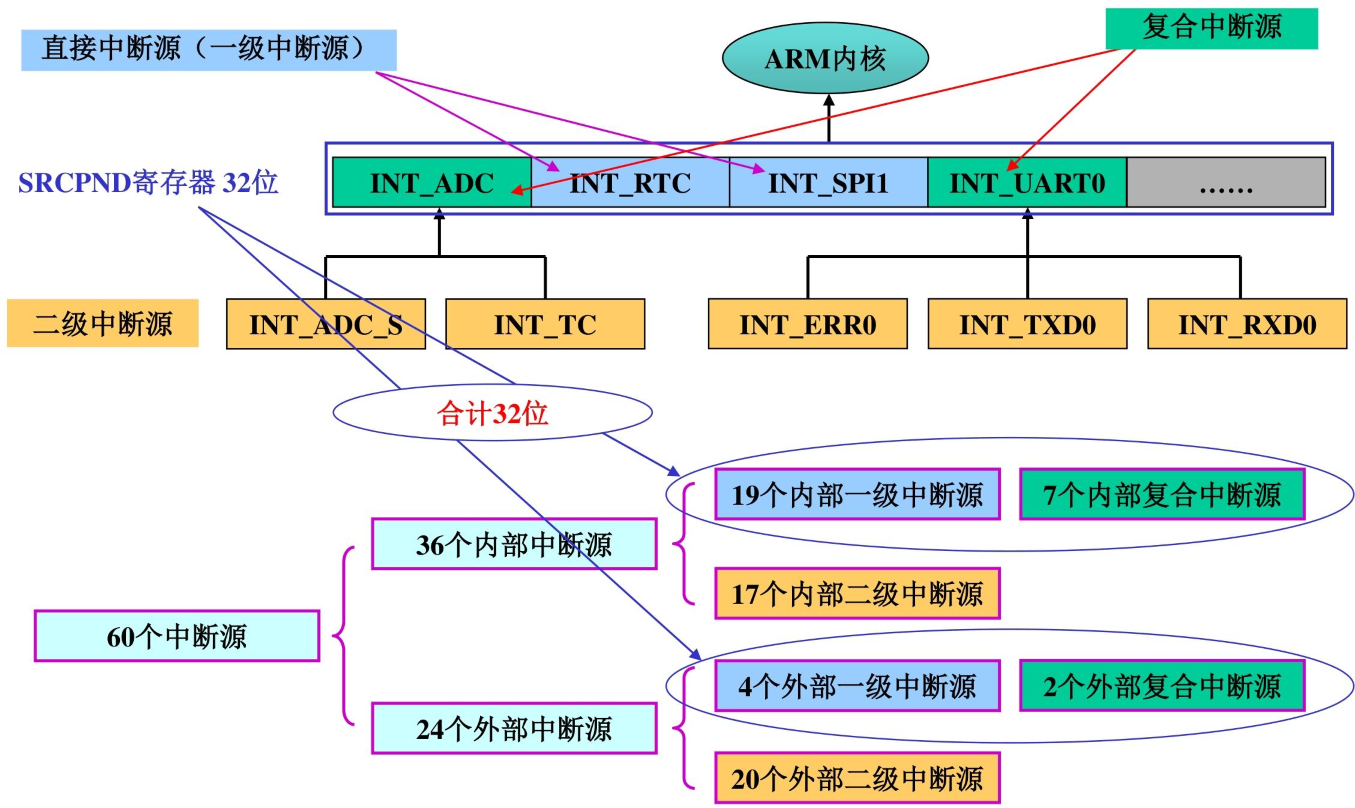
3C2440 有 60 个中断源(触发中断的事件 / 设备),但单个 32 位寄存器只能记录 32 个状态(1 位对应 1 个中断源),因此需要多个寄存器(如 SRCPND、EXTINT 系列、EINTPND 等)配合,才能完整记录和控制 60 个中断源的状态
最基础的分类,核心看中断是 “芯片内部产生” 还是 “外部设备触发”:
内部中断源(36 个):S3C2440 芯片内部的外设模块,是片内硬件工作时主动触发的中断;
- 外部中断源(24 个):芯片外部的设备 / 模块,通过专用引脚触发中断;
① 必须将对应 GPIO 引脚从 “输入 / 输出模式” 配置为 “中断模式”(通过 GPFCON/GPGCON);
② 禁用该引脚的上拉电阻(避免电平漂移干扰中断触发信号);
③ 需通过 EXTINT、EINTFLT 等寄存器配置触发方式、防抖滤波。
- 按 “中断源复杂度” 分(直接 / 复合中断源)
SRCPND 寄存器(中断源未决寄存器) 的细分,核心看 “一个中断标志位是否对应唯一事件”:
- 直接中断源(一级中断源)
- SRCPND 寄存器中 1 个位仅对应一个唯一的中断事件,响应中断后能直接定位到具体来源;
- 数量:23 个(内部 19 个 + 外部 4 个);
- 复合中断源(二级中断源)
- SRCPND 寄存器中 1 个位对应多个中断事件(多个子中断源 “或逻辑” 复合),响应中断后需额外判断才能定位具体来源;
- 数量:37 个(内部 17 个 + 外部 20 个);
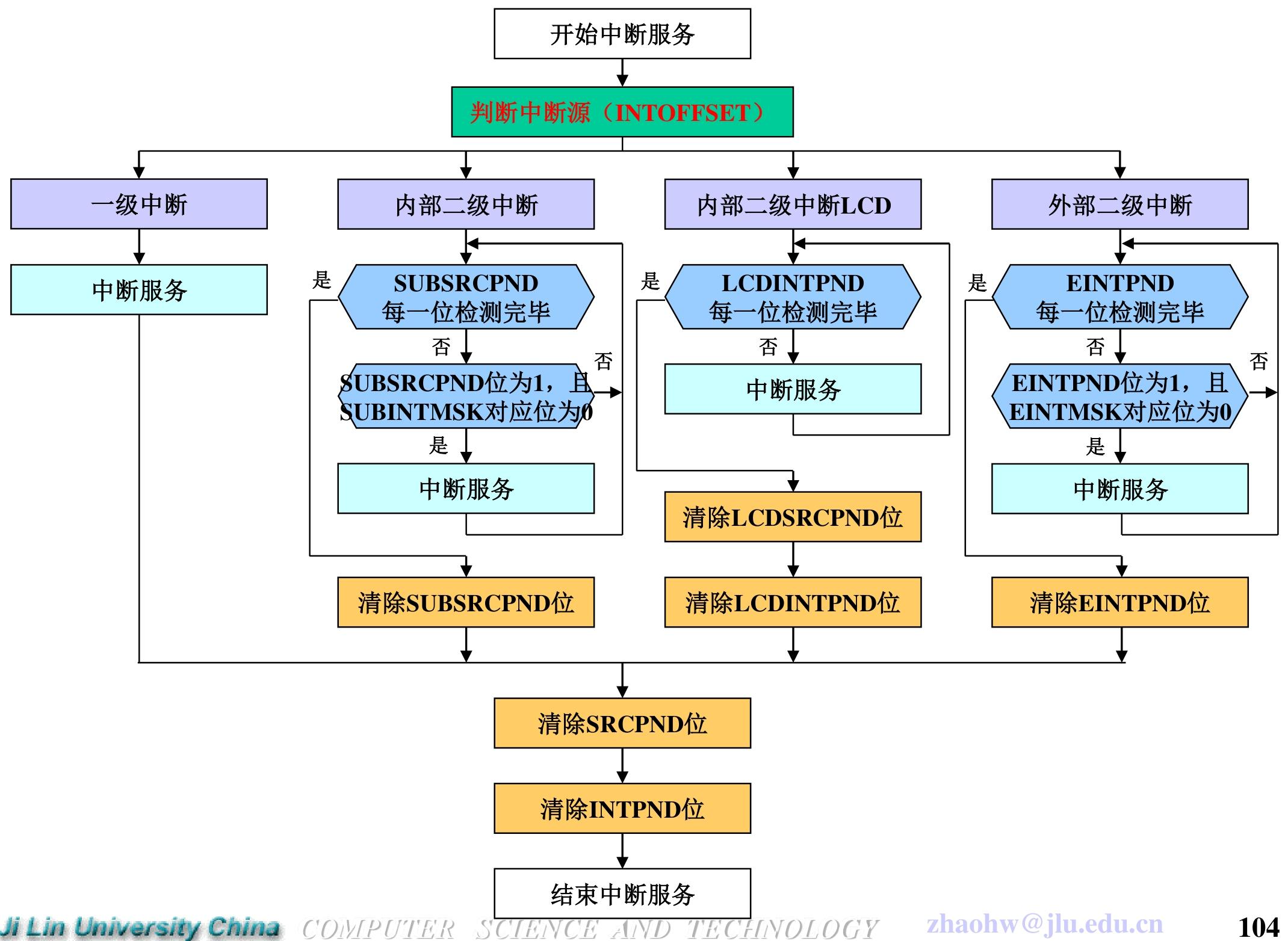
中断过程
中断系统的核心是 “中断源触发→寄存器管控→程序响应” 的闭环流程,寄存器是配置核心,程序应用需遵循 “初始化→使能→处理→清除” 的固定逻辑
- 中断触发:内部外设(如 UART、定时器)或外部设备(如键盘、传感器)产生中断请求,对应中断源置位 SRCPND(子中断源置位 SUBSRCPND)。
- 条件判断:CPU 通过 CPSR 寄存器的 I/F 位判断是否允许中断(I=0 允许 IRQ,F=0 允许 FIQ),同时 INTMSK/SUBINTMSK 判断中断是否被屏蔽。
- 优先级仲裁:7 个仲裁器(6 个一级 + 1 个二级)按 PRIORITY 配置的模式(固定 / 循环)排序,选出最高优先级中断,置位 INTPND 并更新 INTOFFSET。
- 程序跳转:CPU 暂停当前任务,根据 INTOFFSET 值跳转到对应中断服务程序(ISR)。
- 中断处理:执行 ISR 中的业务逻辑(如数据读取、状态提示)。
- 中断清除:手动清除 SUBSRCPND(子中断)、SRCPND、INTPND 的对应位,避免重复响应。
- 恢复现场:ISR 执行完毕,CPU 恢复原任务上下文,回到中断前的程序执行点。
寄存器配置
- 模式与屏蔽配置(中断 “开关”)
| 寄存器 | 核心配置要点 | 关键操作示例(允许 EINT0 中断) |
|---|---|---|
| CPSR | I=0(允许 IRQ)、F=0(允许 FIQ),通过汇编指令修改(如msr cpsr_c, #0x50) |
开启 IRQ 模式:msr cpsr_c, #0x50(I=0,模式为 IRQ) |
| INTMOD | 配置中断为 IRQ(0)或 FIQ(1),仅 1 位可置 1(FIQ 独占) | 设 EINT0 为 IRQ:rINTMOD &= ~BIT_EINT0 |
| INTMSK | 1 = 屏蔽中断,0 = 允许中断,复位值全 1(默认屏蔽所有中断) | 允许 EINT0:rINTMSK &= ~BIT_EINT0 |
| SUBINTMSK | 屏蔽子中断源(如 UART0 的 TXD0/RXD0),1 = 屏蔽,0 = 允许 | 允许 UART0 接收中断:rSUBINTMSK &= ~BIT_RXD0 |
- 优先级配置(中断 “排队规则”)
| 寄存器 | 核心配置要点 | 关键操作示例(默认循环优先级) |
|---|---|---|
| PRIORITY | ARB_MODE(0 = 固定,1 = 循环)、ARB_SEL(指定最低优先级) | 循环优先级:rPRIORITY = 0x0000007F |
- 状态与偏移配置(中断 “定位工具”)
| 寄存器 | 核心配置要点 | 关键操作示例(读取中断源) |
|---|---|---|
| SRCPND | 记录中断源请求状态(1 = 有请求),需写 1 清除 | 清除 EINT0 请求:rSRCPND = BIT_EINT0 |
| INTPND | 记录最高优先级未处理中断(仅 1 位置 1),需写 1 清除 | 清除 EINT0 未决:rINTPND = BIT_EINT0 |
| INTOFFSET | 只读,返回 INTPND 置 1 位的编号,用于定位中断源 | 读取中断编号:unsigned int irq_num = rINTOFFSET |
| SUBSRCPND | 记录子中断源请求状态,需写 1 清除 | 清除 UART0 接收请求:rSUBSRCPND = BIT_RXD0 |
- 外部中断专属配置(外部中断源必备)
| 寄存器 | 核心配置要点 | 关键操作示例(EINT0 下降沿触发) | |
|---|---|---|---|
| EXTINT0~2 | 配置 EINT0~23 的触发方式(000 = 低电平,01×= 下降沿等) | `rEXTINT0 &= 0xFFFFF9F9; rEXTINT0 | = 0x00000202` |
| EINTFLT0~3 | 控制外部中断滤波(滤波时钟 + 宽度),避免信号抖动 | 配置 EINT0 滤波:rEINTFLT0 = 0x0000000F |
|
| EINTMSK | 屏蔽 EINT4~23(1 = 屏蔽),EINT0~3 通过 INTMSK 控制 | 允许 EINT4:rEINTMSK &= ~(1<<4) |
|
| EINTPND | 记录 EINT4~23 的未决状态,需写 1 清除 | 清除 EINT4:rEINTPND = (1<<4) |
程序应用
前期准备:硬件与宏定义
硬件连接:EINT0 接 GPF0、EINT2 接 GPF2,按键 K1/K2 按下触发中断。
- 宏定义(寄存器地址与位掩码):
#define rGPFCON (*(volatile unsigned *)0x56000050) // GPF控制寄存器
#define rGPFUP (*(volatile unsigned *)0x56000058) // GPF上拉寄存器
#define rEXTINT0 (*(volatile unsigned *)0x56000088) // 外部中断控制寄存器0
#define rSRCPND (*(volatile unsigned *)0x4A000000) // 中断源未决寄存器
#define rINTPND (*(volatile unsigned *)0x4A000010) // 中断未决寄存器
#define rINTMSK (*(volatile unsigned *)0x4A000008) // 中断屏蔽寄存器
#define rINTOFFSET (*(volatile unsigned *)0x4A000014) // 中断偏移寄存器
#define BIT_EINT0 (1<<0) // EINT0位掩码
#define BIT_EINT2 (1<<2) // EINT2位掩码
- 中断初始化函数(核心步骤)
初始化需完成 “GPIO 配置→中断触发方式→中断向量绑定”,避免影响其他引脚功能:
// 中断服务函数声明
static void __irq Eint0_ISR(void);
static void __irq Eint2_ISR(void);
void Eint_Init(void) {
// 步骤1:配置GPF0/EINT0、GPF2/EINT2为中断模式
rGPFCON &= 0xFFCC; // 清除原有配置(不影响其他引脚)
rGPFCON |= 0x0022; // GPF0=10(EINT0)、GPF2=10(EINT2)
// 步骤2:禁用GPF0/GPF2上拉电阻(外部中断避免电平漂移)
rGPFUP |= (1<<0) | (1<<2);
// 步骤3:配置EINT0/EINT2为下降沿触发
rEXTINT0 &= 0xFFFF_F9F9; // 清除触发方式配置
rEXTINT0 |= 0x0000_0202; // EINT0/EINT2=01×(下降沿)
// 步骤4:绑定中断向量(中断发生时跳转至对应ISR)
pISR_EINT0 = (unsigned)Eint0_ISR;
pISR_EINT2 = (unsigned)Eint2_ISR;
}
- 中断使能函数(开启中断响应)
使能前需清除残留未决位,避免误触发:
void Enable_Eint(void) {
rPRIORITY = 0x0000_007F; // 使用默认的循环优先级
rINTMOD = 0x0000_0000; // 所有中断均为默认的IRQ中断
// 清除残留未决位
rSRCPND |= BIT_EINT0 | BIT_EINT2;
rINTPND |= BIT_EINT0 | BIT_EINT2;
// 允许EINT0/EINT2中断(清0INTMSK对应位)
rINTMSK &= ~(BIT_EINT0 | BIT_EINT2);
// 开启IRQ模式(CPSR寄存器I=0)
__asm__("msr cpsr_c, #0x50"); // 0x50对应IRQ模式,I=0
}
- 中断服务函数(ISR:中断发生后的处理逻辑)
需遵循 “防抖→处理→清除” 逻辑,__irq关键字标记为中断函数:
// EINT0中断处理函数(K1按下)
static void_irq Eint0_ISR(void) {
Delay(10); // 软件防抖(避免按键抖动误触发)
Uart_Printf("EINT0 is occurred.\n"); // 业务逻辑:输出提示
// 清除中断未决位(必须步骤,否则重复响应)
rSRCPND = BIT_EINT0;
rINTPND = BIT_EINT0;
}
// EINT2中断处理函数(K2按下)
static void_irq Eint2_ISR(void) {
Delay(10);
Uart_Printf("EINT2 is occurred.\n");
rSRCPND = BIT_EINT2;
rINTPND = BIT_EINT2;
}
- 主程序(初始化 + 等待中断)
主程序通过死循环等待中断,中断触发时自动跳转至 ISR:
int Main(void) {
Uart_Init(115200); // 初始化串口(用于输出提示)
Eint_Init(); // 中断初始化
Enable_Eint(); // 开启中断
while(1) { // 死循环等待中断
Uart_Printf("Main program running...\n");
Delay(50);
}
return 0;
}
DMA
DMA(直接存储器访问)是 S3C2440 芯片中实现高速数据传输的关键模块,核心优势是无需 CPU 干预,直接在存储器与外设、存储器与存储器之间传输数据,大幅提升大批量数据传输效率。
- 通道数量:4 个独立 DMA 通道(Ch-0~Ch-3),通道间相互独立,可同时处理不同传输任务。
- 核心作用:解决 CPU 在大批量数据传输(如 UART 收发、LCD 显示、音频数据传输)中的占用问题,释放 CPU 处理其他任务。
- 启动方式:支持硬件请求(外设触发)、软件请求(程序设置)两种启动模式。
DMA 请求方式与请求源
请求方式(2 种)
- 硬件请求(H/W 模式):由选定的外设或外部设备触发 DMA 操作,是最常用的启动方式。
- 软件请求(S/W 模式):通过编程设置寄存器触发 DMA,无需外设信号。
请求源(每通道 7 个,通道间不同)
每个通道可从 7 个专属请求源中选择 1 个,核心对应关系如下:
| 通道 | 核心请求源(典型场景) |
|---|---|
| Ch-0 | UART0(串口 0 数据传输)、Timer(定时器触发)、USB device EP1(USB 设备端点 1) |
| Ch-1 | UART1(串口 1 数据传输)、SPI0(SPI0 通信)、USB device EP2(USB 设备端点 2) |
| Ch-2 | IIS 音频(I2SSDO/SDI)、Timer、MICIN(麦克风输入) |
| Ch-3 | UART2(串口 2 数据传输)、SPI1(SPI1 通信)、PCMOUT(音频输出) |
- 注:nXDREQ0/1 为外部设备请求源,可连接自定义外设。
DMA传输方向
在“源←→目的”之间实现“高性能总线(AHB)←→外设总线(APB)”的传送
4 种组合(AHB↔AHB、AHB→APB、APB→AHB、APB↔APB),覆盖高性能总线与外设总线间所有数据流向。
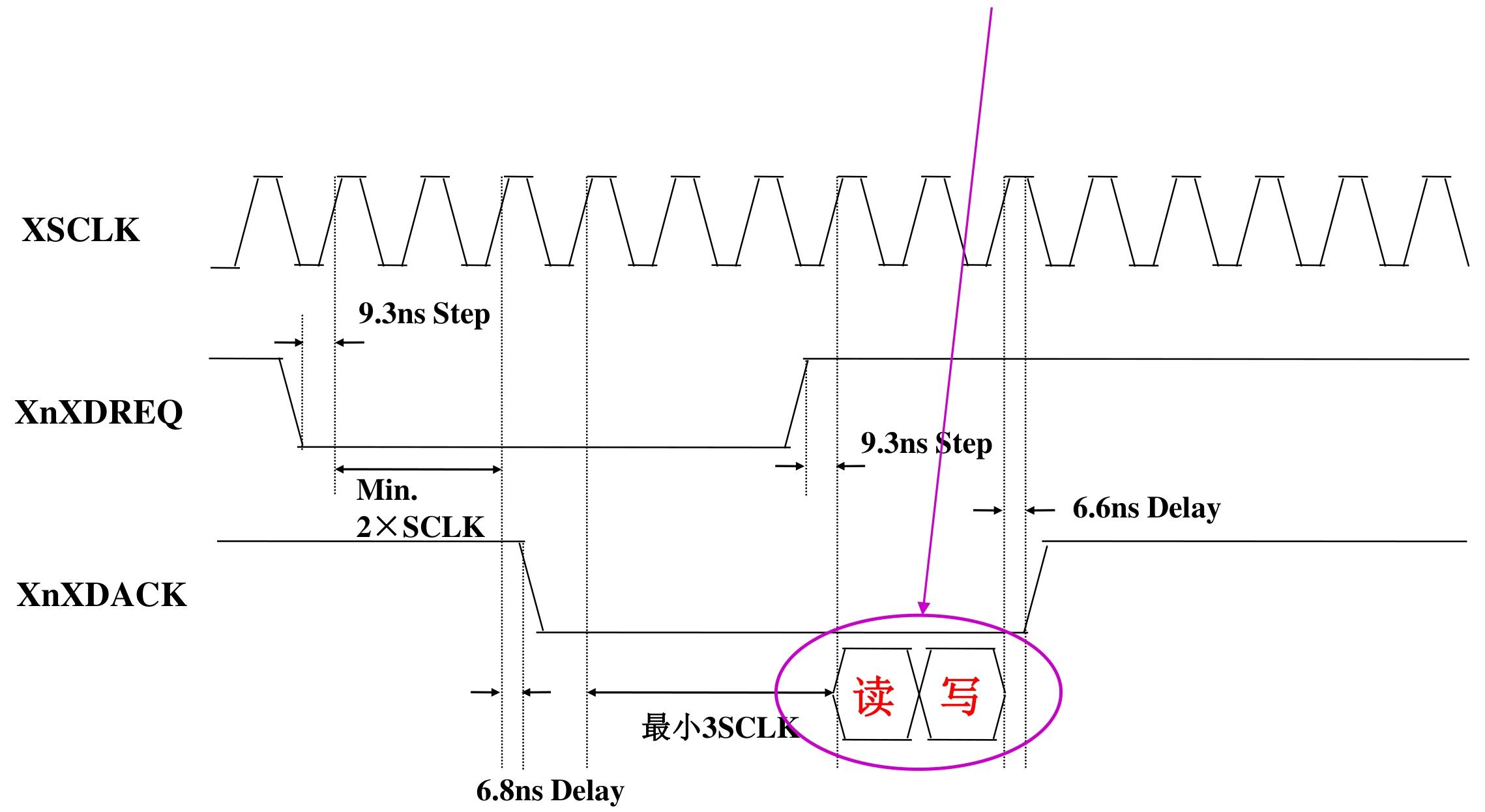
DMA 工作机制(三态 FSM + 核心模式)
DMA 的工作流程遵循固定三态循环,确保传输有序进行:
- 状态 1(等待请求):初始状态,DMA ACK 和中断请求信号均为 0,等待硬件 / 软件请求触发。
- 状态 2(计数器加载):收到请求后,DMA ACK 置 1,从 DCON 寄存器加载 20 位传输计数值到 CURR_TC 计数器。
- 状态 3(数据传输):从源地址读取数据并写入目的地址,每次传输后 CURR_TC 减 1,计数器为 0 时传输结束。
DMA计数器:20位,减1型计数器,每次当前传输结束后计数器的值减1。 计数器值减到0时, 表示DMA操作结束。
DMA工作模式
(1)传输模式(2 种)
- 请求模式(查询模式):单个数据单元传输结束后,若请求信号(XnXDREQ)仍有效,立即启动下一次传输,适合连续批量传输。
- 握手模式:单个数据单元传输结束后,终止本次操作,需重新请求才能启动下一次传输,适合离散数据传输。
(2)服务模式(2 种)
- 单服务模式:一次请求仅完成 1 个数据单元传输。
- 全服务模式:一次请求完成一批数据单元传输,效率更高。
(3)基本传输模式(2 种)
- 单次传输:一次读操作 + 一次写操作,完成 1 个数据单元传输。
- 突发传输:四次连续读 + 四次连续写,完成 4 个数据单元批量传输,提升传输速率。
S3C2440芯片的DMA寄存器
- 传输控制寄存器(6 个,可读可写)
(1)源地址相关寄存器
- DISRCn(初始源地址寄存器):存放传输的源数据起始地址,地址范围 0x4B000000(Ch-0)~0x4B0000C0(Ch-3),复位值 0x00000000。相差0x40
- DISRCCn(源控制寄存器):配置源地址所在总线(LOC 位:0=AHB,1=APB)和地址增量方式(INC 位:0 = 增加,1 = 固定)。
(2)目的地址相关寄存器
- DIDSTn(初始目的地址寄存器):存放传输的目的数据起始地址,地址范围 0x4B000008(Ch-0)~0x4B0000C8(Ch-3),复位值 0x00000000。
- DIDSTCn(目的控制寄存器):配置目的地址所在总线(LOC 位)、地址增量方式(INC 位),额外支持中断触发时机选择(CHK_INT 位)。
(3)核心控制寄存器
- DCONn(DMA 控制寄存器):DMA 配置核心,关键配置包括:
- 传输模式(DMD_HS 位:0 = 请求模式,1 = 握手模式);
- 传输大小(TSZ 位:0 = 单次传输,1 = 突发传输);
- 服务模式(SERVMODE 位:0 = 单服务,1 = 全服务);
- 请求源选择(HWSRCSEL 位:3 位选择 7 个请求源之一);
- 传输计数值(TC 位:20 位,实际传输字节数 = 数据宽度 × 传输大小 × 计数值)。
DMASKTRIGn(屏蔽触发寄存器):控制通道开关(ON_OFF 位:1 = 开启)、软件触发(SW_TRIG 位:1 = 触发)、紧急停止(STOP 位:1 = 传输完成后停止)。
状态寄存器(3 个,仅可读)
DSTATn(DMA 状态寄存器):查看通道状态(STAT 位:00 = 就绪,01 = 忙)和当前计数值(CURR_TC 位)。
- DCSRCn(当前源地址寄存器):实时显示当前源地址值,便于调试传输进度。
- DCDSTn(当前目的地址寄存器):实时显示当前目的地址值,监控传输位置。
DMA 典型工作流程(以 UART1 数据接收为例)
- 配置寄存器:
- 写 DISRC1:设置 UART1 接收数据缓冲区起始地址(源地址)。
- 写 DISRCC1:LOC=1(源在 APB 总线)、INC=0(地址增加)。
- 写 DIDST1:设置存储器中数据存储起始地址(目的地址)。
- 写 DIDSTC1:LOC=0(目的在 AHB 总线)、INC=0(地址增加)。
- 写 DCON1:HWSRCSEL=001(选择 UART1 请求源)、DSZ=00(字节传输)、TSZ=0(单次传输)、SERVMODE=1(全服务模式)。
- 启动 DMA:设置 DMASKTRIG1 的 ON_OFF=1,开启通道。
- 数据传输:UART1 收到数据后触发硬件请求,DMA 自动从 UART1 缓冲区读取数据,写入存储器指定地址。
- 传输结束:计数值(CURR_TC)减至 0,DMA 触发中断(若 INT 位使能),通知 CPU 处理。
定时部件
S3C2440 的定时部件包含看门狗定时器、RTC 实时时钟、Timer 定时器三类核心模块
看门狗定时器(Watchdog Timer)
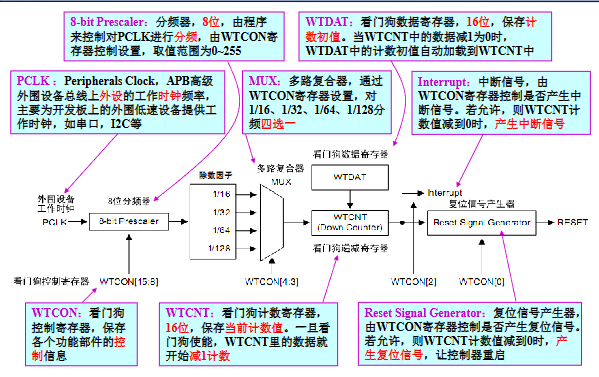
看门狗定时器(WDT)是 S3C2440 的核心容错 / 定时模块,本质是16 位减 1 计数器,核心价值在于 “程序异常时自动复位系统”,也可当作普通定时器用。
- 「定时中断」:计数到 0 时触发中断,可当作普通定时器使用;
- 「系统复位」:计数到 0 时生成内部复位信号,重启芯片(最核心用途:系统出现故障时产生复位信号)。
硬件结构与时钟计算
PCLK(外设时钟)→ 8位预分频器 → 除数因子(16/32/64/128)→ 计数时钟 → WTCNT(减1计数)→ 触发中断/复位
- PCLK:APB 总线时钟(如 50MHz),为看门狗提供基础时钟;
- 8 位预分频器:0~255 可调,先对 PCLK 做第一步分频;
- 除数因子:4 档可选(16/32/64/128),对预分频后的时钟做第二步分频;
- WTCNT:16 位减 1 计数器,每来一个计数时钟就减 1,减到 0 触发中断 / 复位;
- WTDAT:保存计数初值,WTCNT 减到 0 时自动把初值加载到 WTCNT(实现循环计数)。
关键计算公式(必背)
(1)看门狗计数时钟频率
F_watchdog = PCLK ÷ (预分频值 + 1) ÷ 除数因子
示例:PCLK=50MHz,预分频值 = 249,除数因子 = 16
F_watchdog = 50MHz ÷ (249+1) ÷ 16 = 50M ÷ 250 ÷ 16 = 12.5kHz
(2)计数时钟周期
T_watchdog = 1 ÷ F_watchdog
示例:F_watchdog=12.5kHz → T_watchdog=1/12500=80μs
(3)计数初值(定时时间换算)
计数初值 = 定时时间 ÷ T_watchdog - 1
= 定时时间 ×(PCLK /(预分频器值+1)/ 除数因子 )- 1
示例:要定时 1 秒(1000ms),T_watchdog=80μs
计数初值 = 1000000μs ÷ 80μs - 1 = 12500 - 1 = 12499
(注:减 1 是因为计数器从 “初值” 减到 “0” 才算完成一次计数,共经历「初值 + 1」个时钟周期)
看门狗定时器的控制寄存器
| 寄存器 | 地址 | 位宽 | 核心作用 | 复位值 | 读写属性 |
|---|---|---|---|---|---|
| WTCON(控制) | 0x53000000 | 16 位 | 配置分频、使能、中断 / 复位规则 | 0x8021 | 可读可写 |
| WTDAT(数据) | 0x53000004 | 16 位 | 存储计数初值(自动重载) | 0x8000 | 可读可写 |
| WTCNT(计数) | 0x53000008 | 16 位 | 执行减 1 计数(当前值) | 0x8000 | 可读可写 |
关键前提:看门狗的计数时钟 = PCLK / (预分频值 + 1) / 除数因子(PCLK 是外设总线时钟,如 50MHz)。
看门狗控制寄存器(WTCON)
| 位段 | 名称 | 描述 | 初始值 | 配置规则 & 示例 | | ------ | -------------------- | ------------------------------------------------- | ------------------ | ------------------------------------------------------------ | | [15:8] | Prescaler Value | 预分频器值,范围 0~255(2⁸-1) | 0x80(十进制 128) | 例:设为 249 → 预分频后时钟 = PCLK/(249+1);初始值 0x80 是默认预分频值,可修改 | | [7:6] | Reserved | 保留位,必须设为 0 | 00 | 配置时需用
& ~(3<<6)清 0,避免功能异常 | | [5] | Watchdog Timer | 看门狗使能位:0 = 禁用;1 = 启用 | 1 | 复位默认启用,不用时需手动设 0 | | [4:3] | Clock Select | 除数因子(最终分频):00=16;01=32;10=64;11=128 | 00 | 例:设为 11 → 除数因子 = 128;初始值 00 对应除数 16 | | [2] | Interrupt Generation | 中断使能位:0 = 禁用中断;1 = 启用中断 | 0 | 需定时中断则设 1,仅复位则保持 0 | | [1] | Reserved | 保留位,必须设为 0 | 0 | 配置时用& ~(1<<1)清 0 | | [0] | Reset Enable/Disable | 复位使能位:0 = 禁用复位;1 = 计数到 0 触发复位 | 1 | 仅定时中断需设 0,系统容错需保持 1 |复位值 0x8021 的含义(二进制:1000 0000 0010 0001):
- [15:8]=0x80(128)→ 预分频值默认 128;
- [5]=1 → 默认启用看门狗;
- [4:3]=00 → 默认除数因子 16;
- [2]=0 → 默认禁用中断;
- [0]=1 → 默认启用复位功能;
看门狗数据寄存器(WTDAT)
WTDAT 是 “计数初值的仓库”,核心作用是保存看门狗的计数目标值
| 位段 | 名称 | 描述 | 初始值 | 核心规则 & 示例 | | ------ | ------------------ | --------------------------- | ---------------------- | -------------------------------------- | | [15:0] | Count Reload Value | 16 位计数初值,范围 0~65535 | 0x8000(十进制 32768) | 初始值无实际意义,需按定时需求重新计算 |
自动重载:当 WTCNT 减到 0 时,WTDAT 里的初值会自动加载到 WTCNT,实现循环计数(无需 CPU 干预)
看门狗计数寄存器(WTCNT)
WTCNT 是 “实际干活的计数器”,核心是 16 位减 1 计数器
| 位段 | 名称 | 描述 | 初始值 | 核心规则 & 注意事项 | | ------ | ----------- | ------------------------------------ | ---------------------- | ------------------------------ | | [15:0] | Count Value | 计数器当前值,每来一个计数时钟就减 1 | 0x8000(十进制 32768) | 初始值无意义,首次必须手动赋值 |
看门狗启用(WTCON [5]=1)后,WTCNT 开始对 “计数时钟” 减 1,每来 1 个时钟脉冲,值减 1;
WTDAT 的初值不会自动加载到 WTCNT(仅 WTCNT 减到 0 后才会重载),因此首次启用看门狗时,必须手动给 WTCNT 写初值
看门狗定时器初始化
看门狗最核心的两种用法:复位初始化(系统容错) 和定时初始化(中断定时)
看门狗定时器 - 复位初始化(系统容错)
void watchdog_test(void) { // 步骤1:配置预分频值+除数因子(基础时钟分频) rWTCON=((prescaler_value<<8)|(clock_select<<3)); // 步骤2:设置计数初值(WTDAT存储重载值,WTCNT手动赋初值) rWTDAT=15000; // 设置计数初值(WTCNT归0时自动重载) rWTCNT=15000; // 设置计数值(首次计数必须手动赋值,否则从复位值0x8000开始) // 步骤3:清空保留位([1:0]中的[1]是保留位,必须设0) rWTCON &= ~(3<<1); // 3<<1 = 二进制11<<1 = 110,取反后是...11111001 // 作用:把WTCON的bit1、bit2清0(bit1是保留位,bit2是中断位) // 步骤4:启用看门狗+启用复位功能 rWTCON|=((1<<5)|(1<<0)); // 1<<5=bit5置1(启用看门狗);1<<0=bit0置1(启用复位) // 步骤5:死循环(模拟程序跑飞,无喂狗操作) while(1); }看门狗定时器 - 定时初始化(中断定时)
void watchdog_test(void) { // 步骤1:配置预分频值+除数因子(和复位版一致) rWTCON=((prescaler_value<<8)|(clock_select<<3)); // 步骤2:设置计数初值(和复位版一致) rWTDAT=15000; // 设置计数初值 rWTCNT=15000; // 设置计数值(首次必须手动赋值) // 步骤3:启用看门狗+启用中断功能(核心差异点) rWTCON|=(1<<5)|(1<<2); // 1<<5=bit5置1(启用看门狗);1<<2=bit2置1(启用中断) // 步骤4:死循环(等待中断触发) while(1) ; }
RTC 部件(实时时钟)
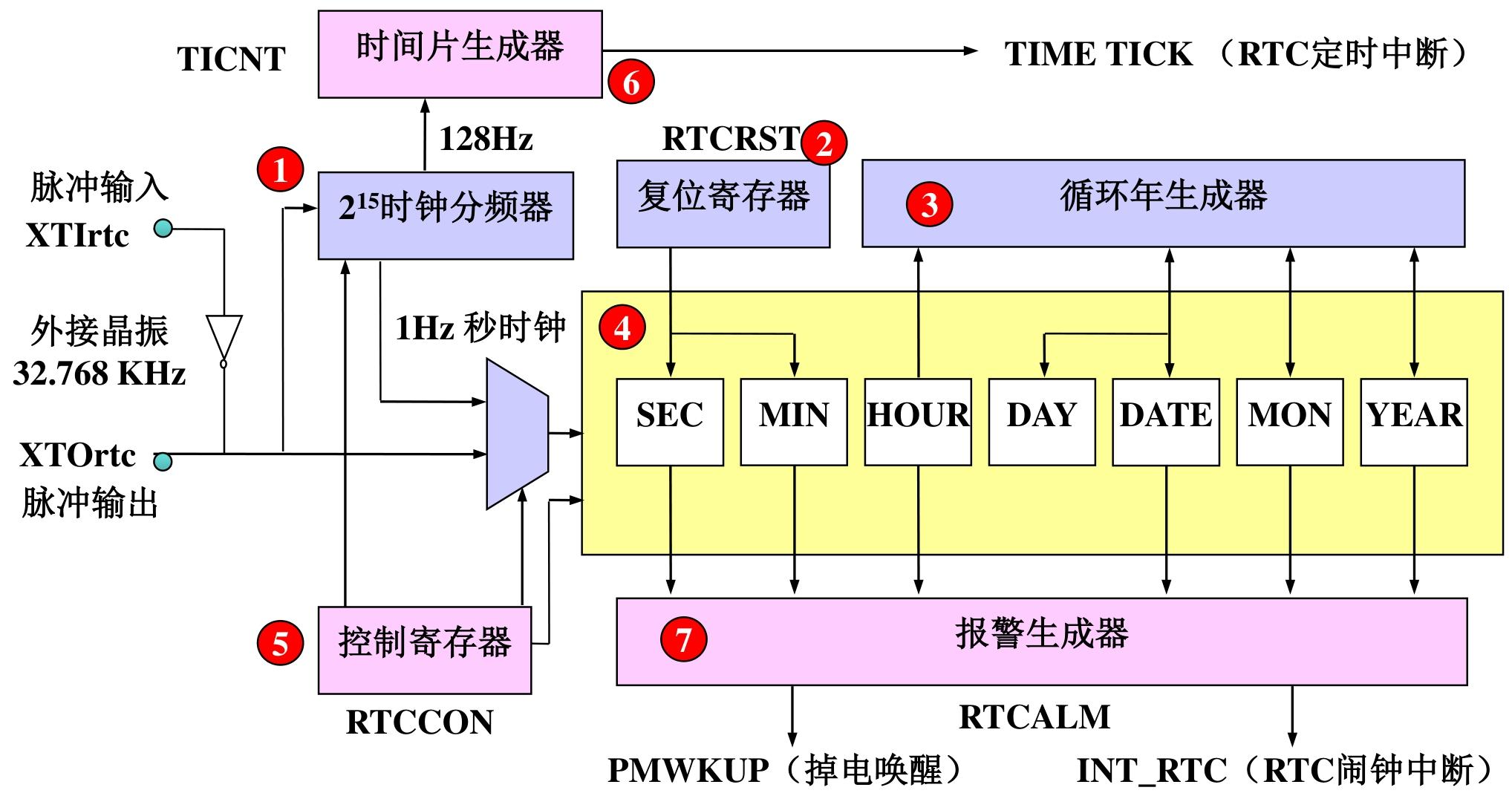
RTC(Real Time Clock,实时时钟)是 S3C2440 芯片中独立的时间管理模块,核心优势是掉电后仍能正常工作(依赖后备电池),可精准记录年 / 月 / 日 / 时 / 分 / 秒 / 星期,支持定时报警和节拍中断
- 时间维度:完整覆盖年、月、日、时、分、秒、星期,解决 2000 年闰年问题。
- 供电与时钟:独立电源引脚(RTCVDD),外接 32.768KHz 高精度晶振,分频后生成 1Hz 秒时钟和 128Hz 节拍时钟。
- 核心功能
- 时间记录:以压缩 BCD 码格式存储时间数据;
- 报警功能:支持年 / 月 / 日 / 时 / 分 / 秒维度报警,可触发中断或唤醒掉电模式;
- 节拍中断:支持毫秒级周期性中断(由 128Hz 时钟衍生);
- 操作指令:支持 LDRB/STRB 指令读写(适配字节级数据)。
- 数据格式:所有时间 / 报警数据均为压缩 BCD 码(如数字 “12” 存储为 0x12,而非十进制 12)。
RTC定时初始化
置 RTC 工作模式 + 设置初始时间(年 / 月 / 日 / 时 / 分 / 秒 / 星期) + 禁用 RTC 以降低功耗
// 1. 寄存器地址宏定义(S3C2440 RTC相关寄存器物理地址)
#define rRTCCON (*(volatile unsigned int *)0x57000040) // RTC总控制寄存器
#define rBCDYEAR (*(volatile unsigned int *)0x57000088) // BCD码年份寄存器(0x00~0x99,对应00~99年)
#define rBCDMON (*(volatile unsigned int *)0x57000084) // BCD码月份寄存器(0x01~0x12)
#define rBCDDATE (*(volatile unsigned int *)0x5700007C) // BCD码日期寄存器(0x01~0x31)
#define rBCDDAY (*(volatile unsigned int *)0x57000080) // BCD码星期寄存器(0x01~0x07,1=周日~7=周六)
#define rBCDHOUR (*(volatile unsigned int *)0x57000078) // BCD码小时寄存器(0x00~0x23)
#define rBCDMIN (*(volatile unsigned int *)0x57000074) // BCD码分钟寄存器(0x00~0x59)
#define rBCDSEC (*(volatile unsigned int *)0x57000070) // BCD码秒寄存器(0x00~0x59)
// 2. 初始时间配置宏定义(需根据需求修改,必须为压缩BCD码格式)
// 示例:2024年10月26日 周五 15:30:00 → BCD码对应 0x24=24, 0x10=10, 0x26=26, 0x05=周五, 0x15=15, 0x30=30, 0x00=00
#define TESTYEAR 0x24 // 年份(BCD码,0x00~0x99)
#define TESTMONTH 0x10 // 月份(BCD码,0x01~0x12)
#define TESTDATE 0x26 // 日期(BCD码,0x01~0x31)
#define TESTDAY 0x05 // 星期(BCD码,0x01~0x07)
#define TESTHOUR 0x15 // 小时(BCD码,0x00~0x23)
#define TESTMIN 0x30 // 分钟(BCD码,0x00~0x59)
#define TESTSEC 0x00 // 秒(BCD码,0x00~0x59)
/**
* @brief RTC初始化函数:配置RTC工作模式并设置初始时间
* @note 1. 时间数据采用压缩BCD码格式(如十进制24 → 0x24,十进制10 → 0x10)
* 2. 操作流程:使能RTC→写入时间→禁用RTC(降低功耗+防止误操作)
* 3. 掉电后需外接备用电池,RTC才能保持时间运行
*/
void Rtc_Init(void)
{
// 步骤1:配置RTCCON寄存器,使能RTC并设置工作模式
// 位操作逻辑:rRTCCON & ~0xf → 清除低4位([3:0]),rRTCCON | 0x1 → 置位bit0(RTCEN=1)
// 最终配置:CLKRST=0(无复位)、CNTSEL=0(合并BCD计数器)、CLKSEL=0(32.768KHz时钟)、RTCEN=1(使能RTC读写)
rRTCCON = rRTCCON & ~(0xf) | 0x1;
// 步骤2:写入初始年份(BCD码),先清后设避免原有值干扰
// rBCDYEAR & ~0xff → 清除低8位(年份寄存器有效位为8位),| TESTYEAR → 写入BCD码年份
rBCDYEAR = rBCDYEAR & ~(0xff) | TESTYEAR;
// 步骤3:写入初始月份(BCD码),低5位有效(月份范围01~12,5位足够表示)
rBCDMON = rBCDMON & ~(0x1f) | TESTMONTH;
// 步骤4:写入初始日期(BCD码),低6位有效(日期范围01~31,6位足够表示)
rBCDDATE = rBCDDATE & ~(0x3f) | TESTDATE;
// 步骤5:写入初始星期(BCD码),低3位有效(星期范围01~07,3位足够表示)
rBCDDAY = rBCDDAY & ~(0x7) | TESTDAY;
// 步骤6:写入初始小时(BCD码),低6位有效(小时范围00~23,6位足够表示)
rBCDHOUR = rBCDHOUR & ~(0x3f) | TESTHOUR;
// 步骤7:写入初始分钟(BCD码),低7位有效(分钟范围00~59,7位足够表示)
rBCDMIN = rBCDMIN & ~(0x7f) | TESTMIN;
// 步骤8:写入初始秒(BCD码),低7位有效(秒范围00~59,7位足够表示)
rBCDSEC = rBCDSEC & ~(0x7f) | TESTSEC;
// 步骤9:禁用RTC,锁定时间寄存器(降低功耗,防止后续误操作)
// 配置:RTCCON=0x0 → RTCEN=0(禁用读写),其他位保持默认(无复位、合并计数器、正常时钟)
rRTCCON = 0x0;
}
Timer 定时器
Timer 定时器是 S3C2440 核心可编程模块,本质是 16 位减 1 计数器,核心能力覆盖精准定时、PWM 脉宽调制、DMA 请求触发,支持多模式配置,适配电机控制、周期性中断等场景
- 硬件规格:5 个独立 16 位定时器(Timer0~Timer4),2 个 8 位可编程预分频器 + 2 个 4 路分频器,支持 5 选 1 时钟源切换。
- 核心功能
- 定时中断:达到设定时间触发中断,释放 CPU;
- PWM 输出:Timer0~Timer3 支持 PWM 波形,占空比可调;
- DMA 请求:可触发 DMA 传输,无需 CPU 干预数据搬运;
- 多工作模式:单脉冲(一次性信号)、自动加载(连续脉冲)、死区生成(防设备同时启动)。
- 关键机制:双缓冲结构(TCNTBn/TCMPBn),运行中可更新配置,下周期生效。
(1)计数时钟频率
计数时钟频率 = PCLK ÷ (预分频值 + 1) ÷ 分频值
示例:PCLK=50MHz,预分频值 = 249,分频值 = 8
计数时钟频率 = 50MHz ÷ (249+1) ÷8 = 25KHz
(2)计数时钟周期
计数时钟周期 = 1 ÷ 计数时钟频率
示例:25KHz 对应时钟周期 = 40μs
(3)定时时间计算
定时时间 = (计数初值 + 1) × 计数时钟周期
→ 计数初值 = 定时时间 ÷ 计数时钟周期 - 1
示例:定时 0.2 秒(200ms),时钟周期 40μs
计数初值 = 200000μs ÷40μs -1 = 4999
(4)PWM 占空比计算
占空比 = (TCNTBn - TCMPBn) ÷ TCNTBn × 100%
示例:TCNTBn=100,TCMPBn=20 → 占空比 = 80%(高电平占 80%)
定时器初始化通用流程
- 选择定时器通道(0~4);
- 配置 TCFG0:设置预分频值;
- 配置 TCFG1:设置分频因子(5 选 1);
- 配置 TCNTBn:写入计数初值(定时周期 / PWM 周期);
- (PWM 模式)配置 TCMPBn:写入比较初值(占空比);
- 配置 TCON:置位 “手动更新”+“自动加载”;
- 清除 TCON “手动更新”,启动定时器;
- (中断模式)配置中断控制器,绑定中断处理函数。
代码实例(2 类核心用法)
用法 1:定时中断(Timer0 产生 0.2 秒中断)
// 寄存器地址宏定义
#define rTCFG0 (*(volatile unsigned int *)0x51000000)
#define rTCFG1 (*(volatile unsigned int *)0x51000004)
#define rTCON (*(volatile unsigned int *)0x51000008)
#define rTCNTB0 (*(volatile unsigned int *)0x5100000C)
#define rTCMPB0 (*(volatile unsigned int *)0x51000010)
void Timer0_Init(void)
{
// 步骤1:配置预分频(Timer0预分频=255)
rTCFG0 &= ~0xFF; // 清Timer0预分频位
rTCFG0 |= 0xFF; // 预分频值=255
// 步骤2:配置分频因子(16分频)
rTCFG1 &= ~0xF; // 清Timer0分频位
rTCFG1 |= 0x3; // 0011=16分频
// 步骤3:计算并设置计数初值(PCLK=50MHz,定时0.2秒)
// 计数时钟频率=50MHz/(255+1)/16≈12.2KHz,时钟周期≈81.92us
rTCNTB0 = 2440; // (2440+1)*81.92us≈0.2秒
// 步骤4:配置TCON(手动更新+自动加载)
rTCON |= (1<<1) | (1<<3); // 置位手动更新、自动加载
rTCON &= ~(1<<1); // 清除手动更新(加载初值)
rTCON |= 1<<0; // 启动Timer0
// 步骤5:配置中断(绑定中断向量)
pISR_TIMER0 = (unsigned)Timer0_ISR;
rINTMSK &= ~BIT_TIMER0; // 解除Timer0中断屏蔽
}
// 中断处理函数
void __irq Timer0_ISR(void)
{
// 清除中断未决位
rSRCPND |= BIT_TIMER0;
rINTPND |= BIT_TIMER0;
// 业务逻辑:如串口输出定时提示
Uart_Printf("Timer0 interrupt trigger!\n");
}
用法 2:PWM 输出(Timer0 产生 50Hz,占空比 50% 波形)
void Timer0_PWM_Init(void)
{
// 步骤1:引脚复用(GPB0=TOUT0)
rGPBCON &= ~0x3;
rGPBCON |= 0x2; // GPB0配置为TOUT0输出
// 步骤2:预分频+分频配置(同定时中断,计数时钟=12.2KHz)
rTCFG0 |= 0xFF;
rTCFG1 |= 0x3;
// 步骤3:设置PWM周期(50Hz=20ms,计数初值=244)
rTCNTB0 = 244; // (244+1)*81.92us≈20ms
// 步骤4:设置占空比50%(比较初值=122)
rTCMPB0 = 122; // 高电平时间=(244-122)*81.92us≈10ms
// 步骤5:启动PWM(自动加载模式)
rTCON |= (1<<1) | (1<<3);
rTCON &= ~(1<<1);
rTCON |= 1<<0;
}
关键注意事项(避坑指南)
- 手动更新必须配置:启动定时器前,需先置位 “手动更新”,加载 TCNTBn/TCMPBn 初值,再清除该位;
- PWM 通道限制:Timer4 无 PWM 功能,无 TCMPB4 寄存器;
- 引脚复用:TOUT0~TOUT3 与 GPB0~GPB3 复用,需先配置引脚功能;
- 死区仅 Timer0 支持:其他通道无死区生成器;
- 双缓冲生效时机:运行中修改 TCNTBn/TCMPBn,需等待当前周期结束,下周期才会应用新配置。
UART
UART(通用异步收发器)是嵌入式系统中最核心的串行通信模块,S3C2440 的 UART 模块功能丰富、配置灵活
| 术语 | 解释 |
|---|---|
| 串行通信 | 数据一位一位传输(对比并行通信),优点:传输线少、成本低、适合远距离;缺点:速度慢 |
| 通信方向 | 单工(仅收 / 仅发)、半双工(收 / 发分时)、全双工(收 / 发同时,UART 支持) |
| 通信同步方式 | 异步通信(UART):收发无共用时钟,靠帧格式同步;同步通信:收发共用时钟(如 SPI) |
| 数据传输规则 | UART 以字符为单位,先低位后高位 逐位传输,靠 “起始位 + 停止位” 界定字符边界 |
- UART 帧格式(通用标准)
一个完整的 UART 传输帧包含 5 部分(可编程配置)
空闲位(高电平)→ 起始位(1位,低电平)→ 数据位(5~8位)→ 奇偶校验位(可选)→ 停止位(1~2位,高电平)
例:文档中 “8N1” 格式 = 1 起始位 + 8 数据位 + 无校验 + 1 停止位(最常用)。
S3C2440 内置 3 个独立 UART 通道(UART0/1/2),核心特性可归纳为 8 类:
- 通道差异化特性
| 通道 | 核心能力 | 特殊限制 |
|---|---|---|
| UART0 | 支持 AFC 自动流控、红外模式 | 复用 GPH0(nCTS0)/GPH1(nRTS0) |
| UART1 | 支持 AFC 自动流控、红外模式 | 复用 GPG10(nCTS1)/GPG9(nRTS1) |
| UART2 | 无 AFC、无 nRTS/nCTS 引脚 | 仅基础收发,复用 GPH7(RXD2)/GPH6(TXD2 |
工作模式(3 种)
查询模式(轮询):CPU 主动查询状态寄存器,判断收发状态(简单但占用 CPU);
- 中断模式:收发就绪 / 出错时触发中断,CPU 按需处理(高效,推荐);
DMA 模式:收发数据直接通过 DMA 搬运,CPU 无需参与(高吞吐场景)。
数据缓冲方式(2 种)
单寄存器模式:收发各 1 个 8 位缓冲寄存器(UTXHn/URXHn),无 FIFO;
FIFO 模式:收发各 64 字节 FIFO,可设置触发阈值(减少中断次数)。
其他关键特性
时钟源:3 选一(PCLK / 外设时钟、FCLK/n/ 内核分频、UEXTCLK / 外部时钟);
- 波特率:最大 115.2Kbps(UEXTCLK 可更高),内置波特率发生器;
- 测试模式:回送模式(自发自收,用于自检)、红外模式(IR,适配红外通信);
- 错误检测:支持溢出 / 奇偶校验 / 帧错误 / 终止条件检测,错误状态可触发中断。
S3C2440 UART 核心原理
ART 模块由 4 个核心子模块组成,信号流向:
CPU → 控制单元 → 波特率发生器 → 发送器(并串转换)→ TxD引脚
RxD引脚 → 接收器(串并转换)→ 控制单元 → CPU
波特率计算(核心公式)
时钟源(PCLK/FCLK/n/UEXTCLK)→ 预分频(可选)→ UBRDIVn分频 → 移位时钟(波特率×16)
- 时钟源选择:通过 UCONn 寄存器 [11:10] 位三选一:
- 00/10:PCLK(外设时钟,例中为 50MHz);
- 01:UEXTCLK(外部输入时钟);
- 11:FCLK/n(内核时钟分频);
- UBRDIVn 分频:核心分频环节,16 位除数寄存器(UBRDIVn)实现 “源时钟 ÷ (UBRDIVn + 1)” 的分频。
波特率由 “时钟源” 和 “UBRDIVn 除数” 共同决定,公式:

UART 的移位时钟频率必须是波特率的 16 倍
UART0 初始化
UART 初始化的核心是 “硬件引脚→时钟→波特率→帧格式→功能禁用 / 启用→工作模式” 的递进配置
| 通用流程步骤 | 例 5-9 具体操作 | 核心寄存器 | 配置目标 |
|---|---|---|---|
| 1. 初始化引脚 | 配置 GPH2=TXD0、GPH3=RXD0,禁用上拉 | GPHCON、GPHUP | 引脚复用为 UART 功能,而非 GPIO |
| 2. 选择时钟源 | 选择 PCLK(50MHz)作为 UART 时钟 | UCON0[11:10] | 为波特率计算提供时钟基准 |
| 3. 配置波特率 | 计算并设置 UBRDIV0=0x1A(26) | UBRDIV0 | 实现 115200bps 波特率 |
| 4. 配置帧格式 | 8 位数据位、1 位停止位、无校验 | ULCON0 | 匹配 “1 起始 + 8 数据 + 无校验 + 1 停止” 的帧格式 |
| 5. 配置自动流控 | 禁用 AFC 功能 | UMCON0 | 无需 nRTS/nCTS 流控信号 |
| 6. 配置收发 FIFO | 禁用 FIFO 模式 | UFCON0 | 仅使用单寄存器缓冲收发 |
| 7. 配置收发模式 | 配置为查询(轮询)模式 | UCON0[3:0] | CPU 主动查询状态寄存器完成收发 |
// 1. 寄存器地址宏定义(S3C2440 UART0及GPIO相关寄存器)
#define rULCON0 (*(volatile unsigned int *)0x50000000) // UART0线控制寄存器(帧格式)
#define rUCON0 (*(volatile unsigned int *)0x50000004) // UART0控制寄存器(时钟/模式)
#define rUFCON0 (*(volatile unsigned int *)0x50000008) // UART0 FIFO控制寄存器
#define rUMCON0 (*(volatile unsigned int *)0x5000000C) // UART0 MODEM控制寄存器(流控)
#define rUTRSTAT0 (*(volatile unsigned int *)0x50000010) // UART0状态寄存器(收发状态)
#define rUBRDIV0 (*(volatile unsigned int *)0x50000028) // UART0波特率除数寄存器
#define rUTXH0 (*(volatile unsigned int *)0x50000020) // UART0发送缓冲寄存器(写数据)
#define rURXH0 (*(volatile unsigned int *)0x50000024) // UART0接收缓冲寄存器(读数据)
#define rGPHCON (*(volatile unsigned int *)0x56000070) // GPIO GPH端口配置寄存器(引脚复用)
#define rGPHUP (*(volatile unsigned int *)0x56000078) // GPIO GPH端口上拉电阻控制寄存器
// 2. 主函数(初始化+循环收发)
int TSmain( )
{
char buf; // 存储收发数据的缓冲变量(8位,匹配UART字节传输)
/************************** 步骤1:GPIO引脚配置(GPH2=TXD0,GPH3=RXD0)**************************/
// 清除GPH2[5:4]、GPH3[7:6]原有配置,避免干扰
rGPHCON &= 0xFFFF0F;
// 配置GPH2=10(TXD0)、GPH3=10(RXD0),复用为UART0功能
rGPHCON |= 0xA0;
// 清除GPH2、GPH3的上拉配置
rGPHUP &= 0x7F3;
// 禁用GPH2、GPH3上拉电阻(UART通信无需上拉)
rGPHUP |= 0x00C;
/************************** 步骤2:UART0核心初始化 **************************/
// 配置帧格式:1起始位+8数据位+无校验+1停止位(8N1)
rULCON0 &= 0x00; // 清除原有配置
rULCON0 |= 0x03; // 00000011 → 数据位8位、无校验、停止位1位
// 配置时钟源+收发模式:PCLK(50MHz)+ 查询模式
rUCON0 = 0x0805; // 0000100000000101 → 时钟源=PCLK,收发均为查询/中断模式(本例用查询)
// 配置波特率:115200bps,除数因子=26(0x1A)
rUBRDIV0 = 0x1A;
// 禁用FIFO模式(仅用单寄存器缓冲)
rUFCON0 = 0x00;
// 禁用自动流控AFC(无需nRTS/nCTS引脚)
rUMCON0 = 0x00;
/************************** 步骤3:循环查询收发(回声功能)**************************/
while (1)
{
// 查询接收状态:UTRSTAT0[0]=1 → 接收缓冲有数据
if (rUTRSTAT0 & 0x01)
{
buf = rURXH0; // 从接收缓冲寄存器读取数据
}
// 查询发送状态:UTRSTAT0[2]=1 → 发送器空(缓冲+移位寄存器均空,发送完成)
if (rUTRSTAT0 & 0x04)
{
rUTXH0 = buf; // 把接收的数据写入发送缓冲寄存器,实现回声
}
}
return 0;
}
// 3. 汇编入口(指定程序入口,设置堆栈)
AREA |DATA|, CODE, READONLY
ENTRY ; 标记程序入口
ldr r13, =0x1000 ; 设置堆栈指针SP地址为0x1000
b TSmain ; 跳转到主函数TSmain
IMPORT TSmain ; 声明TSmain为外部定义(若分文件编译需保留)
END ; 程序结束
ADC 及触摸屏接口
S3C2440 集成的 ADC(模数转换器)与触摸屏接口是嵌入式系统中模拟信号采集、触控输入的核心模块
ADC 基础原理
将连续的模拟电压信号(如传感器、触摸屏分压)转换为离散的数字信号,供 CPU 处理;核心过程为采样→量化→编码:
- 采样:按 “采样定理(采样频率≥2× 信号最高频率)” 将时间连续的模拟信号转为时间离散的信号;
- 量化:将幅值连续的采样信号转为幅值离散的信号;
- 编码:将量化后的信号转为二进制数字(S3C2440 为 10 位)。
主流转换方法对比
| 转换方法 | 核心原理 | 优势 | 劣势 | 应用场景 |
|---|---|---|---|---|
| 计数式 | 斜坡电压与被测电压比较 | 电路简单、成本低 | 转换速度极慢 | 低速简易场景 |
| 双积分式 | 对输入 / 参考电压两次积分 | 精度高、抗干扰强 | 速度慢(<10Hz) | 仪器仪表、温度测量 |
| 逐次逼近式 | 二分法逼近被测电压 | 速度快、精度适中 | 抗干扰一般 | 微型机(S3C2440 采用) |
ADC 关键指标:
- 分辨率:S3C2440 为 10 位(数字输出范围 0~0x3FF),对应最小可分辨电压 = 3.3V/1024≈3.22mV;
- 转换速率:最大 500KSPS(每秒采样 50 万次),由 PCLK 分频后的 ADC 时钟决定;
- 量程:模拟输入电压 0~3.3V(单极性);
- 转换时间:公式为
5/(PCLK/(预分频值+1))(10 位转换需 5 个 ADC 时钟周期)。
ADC 工作模式
ADC有五种工作模式,采用不同方式采集信号
| 模式类型 | 适用场景 | 核心配置 / 操作 |
|---|---|---|
| 普通转换模式 | 非触摸屏的单通道模拟采集 | ADCTSC [1:0]=00,选通道后命令启动 ADC |
| 分离 XY 坐标转换模式 | 触摸屏手动分步采集 X/Y | ADCTSC=0x69(X)/0x09(Y),分别转换 |
| 自动(连续)XY 坐标模式 | 触摸屏一键采集 X/Y | ADCTSC [2]=1,连续转换 X/Y 并存入 ADCDAT0/1 |
| 等待中断模式 | 检测触摸屏按下 / 抬起 | ADCTSC [1:0]=11,触发 INT_TC 中断 |
| 备用模式 | 低功耗待机 | ADCCON [2]=1,停止 ADC 转换 |
核心寄存器
通过下面的寄存器配置可以控制ADC
| 寄存器 | 地址 | 核心功能 | 关键位 / 配置 |
|---|---|---|---|
| ADCCON | 0x58000000 | ADC 主控(时钟 / 启动 / 通道) | [14]:预分频使能;[13:6]:预分频值;[0]:命令启动 |
| ADCTSC | 0x58000004 | 触摸屏控制(模式 / 引脚) | [1:0]:工作模式;[2]:自动 XY 转换;[3]:XP 上拉 |
| ADCDLY | 0x58000008 | 转换延时 | [15:0]:延时值(等待中断模式需≥ms 级) |
| ADCDAT0/1 | 0x5800000C/10 | 转换数据存储 | [9:0]:X/Y 坐标(10 位数据) |
| ADCUPDN | 0x58000014 | 触摸中断标志 | [0]:按下中断;[1]:抬起中断 |
触摸屏坐标采集
通过 “等待中断模式检测触摸→自动 XY 模式采集坐标→UART 输出结果” 实现触摸屏触控采集,完整流程如下:
步骤 1:系统时钟配置
- 设置分频比:FCLK:HCLK:PCLK=1:3:6;
- 配置 MPLL:Fin=12MHz→FCLK=202.8MHz→PCLK=33.8MHz(ADC 时钟源)。
步骤 2:UART 初始化
- 配置 UART0 为 115200bps、8N1、禁用 FIFO,用于坐标数据输出。
步骤 3:ADC + 触摸屏初始化
- 配置 ADCDLY:设置延时值(如 50000,对应 13.56ms);
- 配置 ADCCON:预分频使能 + 预分频值 39(ADC 时钟 = 33.8MHz/40≈845KHz)+ 普通模式;
- 配置 ADCTSC:设为等待中断模式(0xD3),检测触摸按下;
- 中断配置:映射 ADC 中断向量→清除未决位→开启 INT_ADC/INT_TC 中断。
步骤 4:中断服务程序(核心)
- 关中断:避免嵌套干扰;
- 切换模式:ADCTSC 设为自动连续 XY 坐标转换模式;
- 启动 ADC:命令启动(ADCCON [0]=1),查询转换完成标志(ADCCON [15]=1);
- 读取数据:循环 5 次采集 X/Y 坐标,存入 ADCDAT0/1;
- 输出数据:通过 UART 打印 5 组坐标;
- 恢复模式:重置 ADCTSC 为等待中断模式,清除中断标志并重新开中断。
步骤 5:关闭触摸屏
- 关中断→配置 ADCCON 为备用模式(低功耗)。
[!tip]
- ADC 核心:以逐次逼近式为基础,通过 PCLK 分频控制转换速率,10 位分辨率满足大多数嵌入式模拟采集需求;
- 触摸屏核心:复用 ADC 通道,通过电阻分压原理实现坐标采集,结合中断模式实现触摸事件的高效检测;
- 编程关键
- 时钟配置:预分频值需保证 ADC 时钟≤2.5MHz(最大转换速率);
- 模式切换:等待中断模式(检测触摸)与自动 XY 模式(采集坐标)的配合;
- 中断管理:正确清除未决位、开关中断,避免漏触发 / 重复触发;