存储管理
存储管理功能
术语和概念
- 存储分配和去配
- 分配和去配的对象:内存、外存
- 分配和去配的时刻:进程创建、撤销、交换、长度变化(栈溢出, execl)
- 分配表和空闲表
- 存储共享
- 目的是节省内存、相互通讯
- 内容为代码和数据
- 存储保护:防止地址越界、防止操作越权
- 存储扩充
- 内存、外存结合,虚拟存储体系
- 速度接近内存,容量相当外存
- 地址映射
- 逻辑地址映射为物理地址
- 硬件支撑:基址寄存器(base)、限长寄存器(limit)、快表
[!tip]
- 固定地址映射:编译时确定映射关系
- 静态地址映射:程序装入时由OS完成映射(物理地址=逻辑地址+装入地址)
- 动态地址映射:在程序执行过程中完成映射,需要MMU内存管理单元
存储体系
- 三级存储体系

Cache(快,小,贵)+内存(适中)+辅存(慢,大,廉)
利用存储器访问的局部性原理
内存资源管理
内存分区
- 分区时刻:静态(系统初始化时),动态(申请时,系统运行中)
- 分区大小:等长或异长
- 通常做法:
- 静态+等长(页式、段页式)
- 动态+异长(段式、界地址)
内存分配
静态等长分区的分配
- 位示图
- 用一个bit代表一页状态,0表空闲,1表占用。( 多单元)
- 分配:自头寻找第一个为0的位,改为1,返回页号;
去配:找到页后,将页号对应的位(bit)置为0。
空闲页面表:若干个连续的空闲页面作为一组登记在空闲页面表中。
- 空闲页面链:将所有的空闲页面连成一个空闲页面链
动态异长分区的分配
[!note]
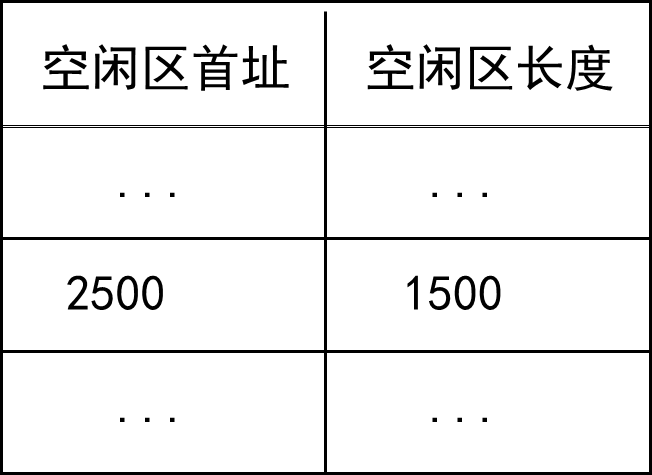
空闲区域表: 记录当前未被进程占用的空闲区域。
初始时一个连续空闲区。长度=0为表尾。
尽量使空闲区域连续
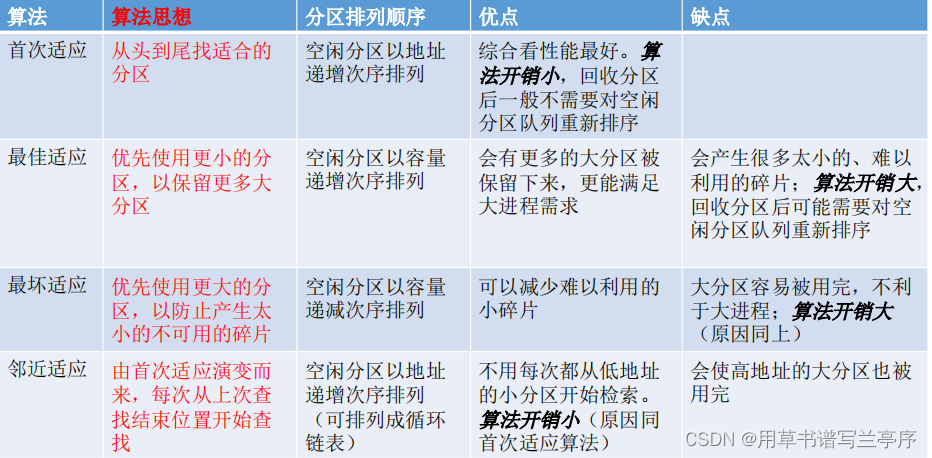
最先适应算法(First Fit)
- 空闲区:首地址按递增排序
- 申请:取满足申请长度要求并且起始地址最小的空闲区域
下次适应算法(Next Fit)
空闲区:首址递增排列;
申请:自上次分配空闲区域 的下一个位置开始,选取第一个满足区域;
最佳适应算法(Best Fit)
空闲区:首址递增排列;
申请:取最小可满足区域;
例题
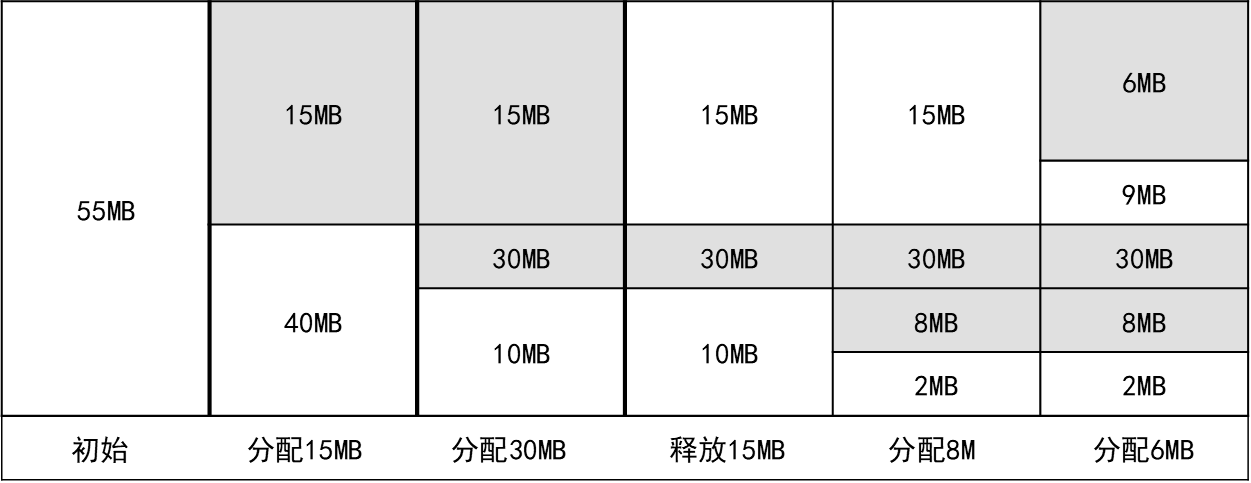
某基于动态分区存储管理的计算机,其主存容量为55MB(初始为空闲),采用最佳适配(Best Fit)算法,分配和释放的顺序为:分配15MB、分配30MB、释放15MB、分配8MB、分配6MB,此时主存中最大空闲分区的大小是__.
四种算法的比较
碎片处理
- 动态异长分区存储分配可能形成很小的空闲区域,称为碎片(fragment)
- 解决方法-紧凑(compaction):移动所有的占有区域,以使所有的空闲区域连成一片
- 紧凑的时期:系统找不到足够大的空闲区时;定期
存储管理方式
界地址管理方式
基本原理:
- 内存空间划分:动态异长;
- 进程空间划分:一个进程一个区域,逻辑地址
0 ~ l-1 - 所需表目:内存分配表,空闲区域表
- 所需寄存器:基址(首址)寄存器,限长寄存器
- 地址映射
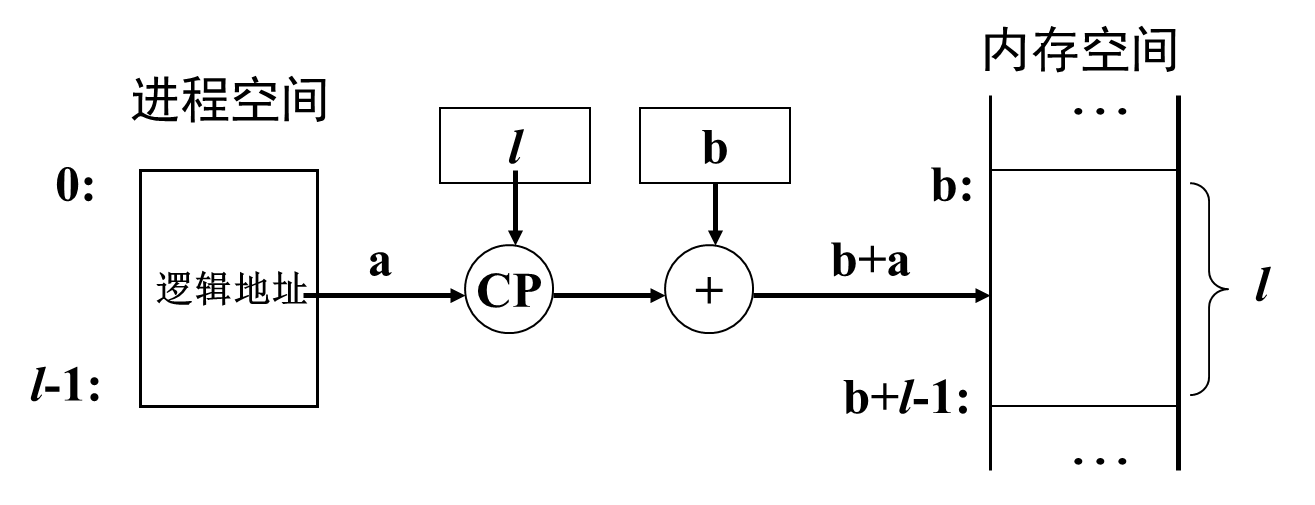
- 由程序确定逻辑地址a
- 不满足:
0<=a<=*l-1则越界; - a与b相加得到物理地址
[!note]
双对界:允许一个进程在内存中占有2个连续的区域。
- 代码(I空间):一对界
(b1,l1)- 数据(D空间):一对界
(b2,l2)
技术原理
交换技术
- 内存不够时把进程写到磁盘(主存)(换出/Swap Out)
当进程要运行时重新写回内存(换入/Swap In)
需要考虑IO操作的CPU开销以及交换的单位大小
- 外存交换空间的管理方法,程序换入时的地址重定位问题
覆盖技术
在较小的内存空间中运行较大的程序
内存分区:
- 常驻区:被全局代码和数据占用,可划分多个
- 覆盖区:能被多个段共同(覆盖),可划分多个
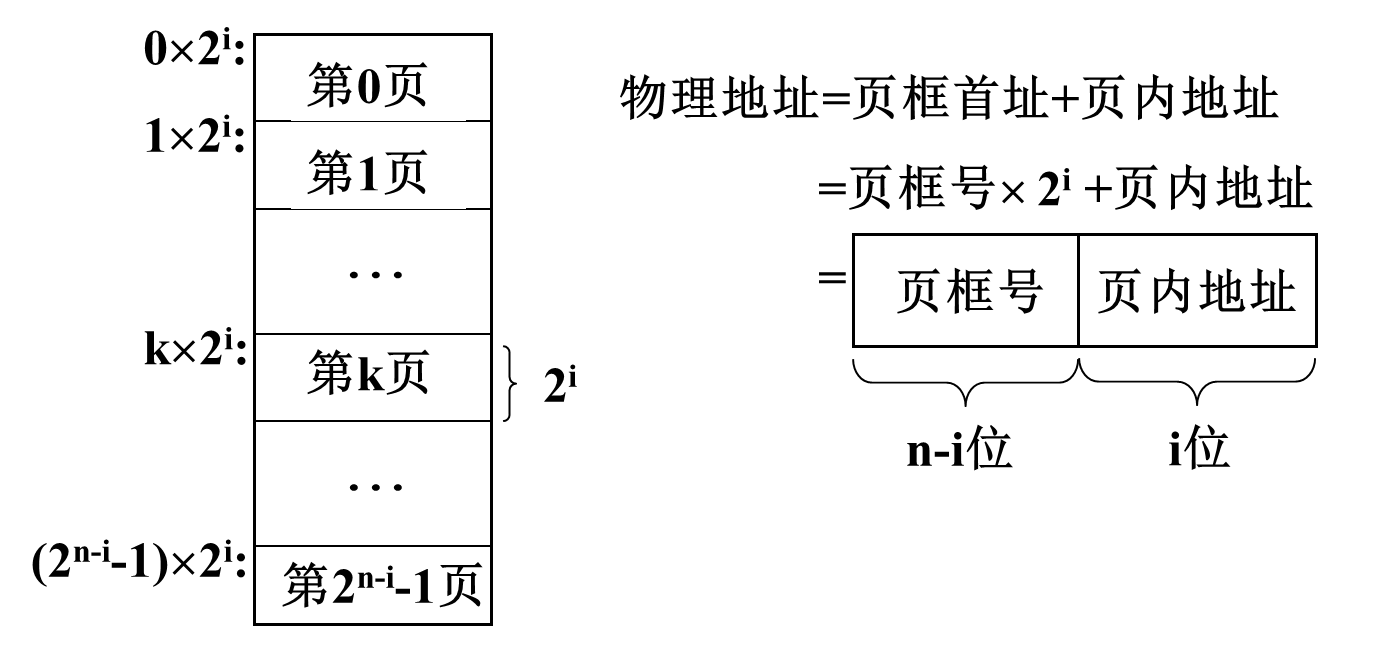
分页式存储管理
内存空间划分:静态等长,2^i,称为一个页框(frame)
- 所需表目:页表(每个进程一个);总页表:系统一个记录内存的分配和使用状态
- 所需寄存器:页表寄存器一个,页表长度寄存器一个,快表(TLB):一组
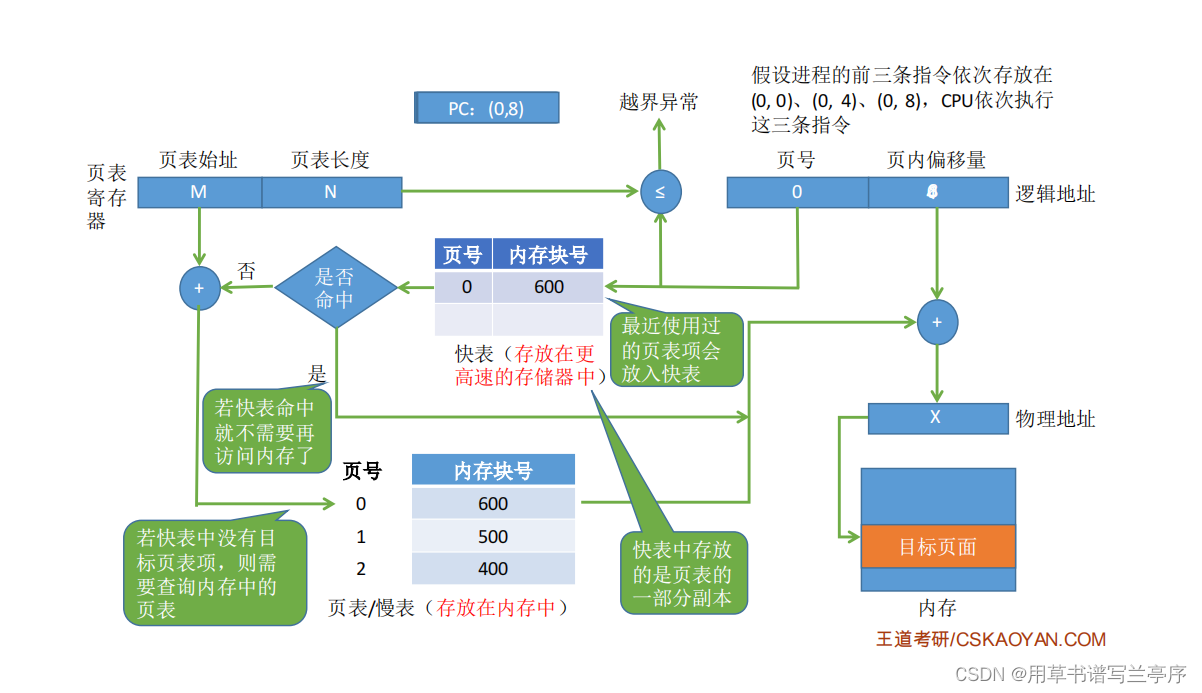
快表
- 一组联想寄存器,用于保存正在运行进程的页表中的部分表项
- 页表长度一般大于快表的长度
- 通常只将正在访问的页面所对应的项目记录于快表中;
- 访问一个页面时,由逻辑页号先在快表中进行查找,如果找到则根据页框号和页内地址形成物理地址;如果没找到,则由逻辑页号在页表中查找,并将查找的页框号和页号送入快表,如快表满则淘汰。类似于Cache
- 快表命中率:访问页号在快表的次数与总访问次数之比
- 平均访存时间EAT=
快表命中率*(快表访问时间+内存访问时间)+(1-快表命中率)*(快表访问时间+2*内存访问时间) ns - 当有缺页时:EAT=
快表命中率*(快表访问时间+内存访问时间)+(1-快表命中率)*(快表访问时间+2*内存访问时间)+缺页故障率* 缺页中断处理时间] ns
- 页号=逻辑地址/页面长度(取除法的整数部分);十六进制时可以转换为二进制计算
- 页内偏移量 = 逻辑地址%页面长度(取除法的余数部分)
- 页面在内存中的起始位置:操作系统需要用某种数据结构记录进程各个页面的起始位置。
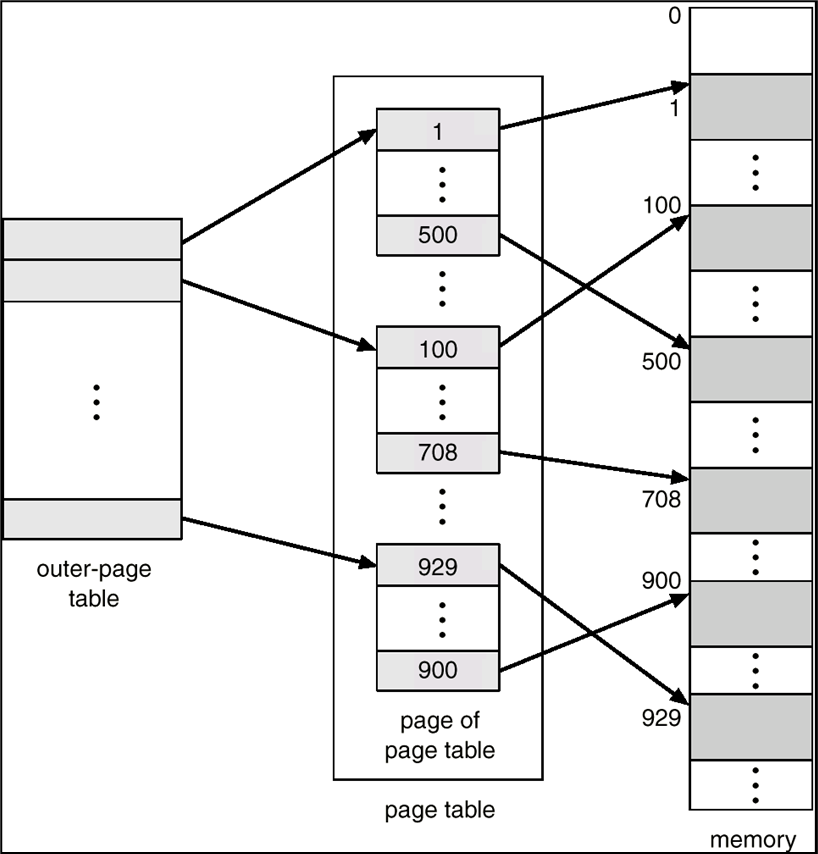
多级页表
二级或多级页表:
- 将4M的超大页表存储到离散的1K个页框中
- 仅将页表的部分内容调入内存.
- 对页表进行分页,称页表页,长度与页框相同(4K),可移到外存
- 页表页之间可以不连续
- 外页表入口指向了页表页的起始地址(物理页框号)
- 多级页表:将大页表进行分页。内存仅存放当前使用的页表
- 系统为每个进程建立一张页目录表,它的每个表项对应一个页表页,
- 页表页的每个表项给出了页面和页框的对应关系
- 此时,页目录表为一级页表(外页表),页表页是二级页表。
[!important]
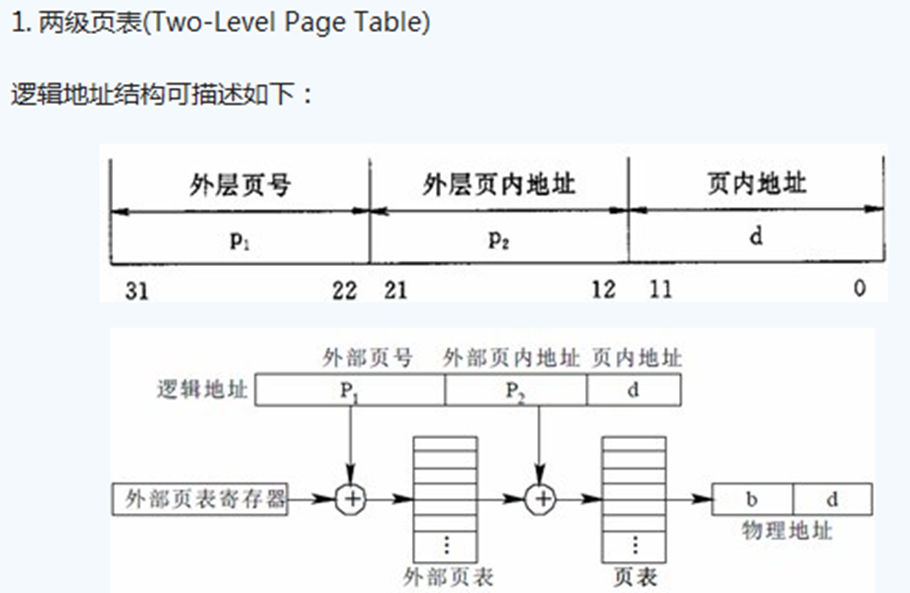
二级页表地址映射特点
- 访问数据需要三次访问内存(页目录表,页表页,存储单元)(N级页表访问一个逻辑地址需要N+1次访问内存。)
- 页目录调入内存
- 页表页按需调入内存
- 页面、页表页、页目录表的大小都刚好4k(占1个页框)即若采用多级页表机制,则各级页表的大小不能超过一个页面
EAT=
快表命中率*(快表访问时间+内存访问时间)+(1-快表命中率)*(快表访问时间+(n+1)*内存访问时间) ns
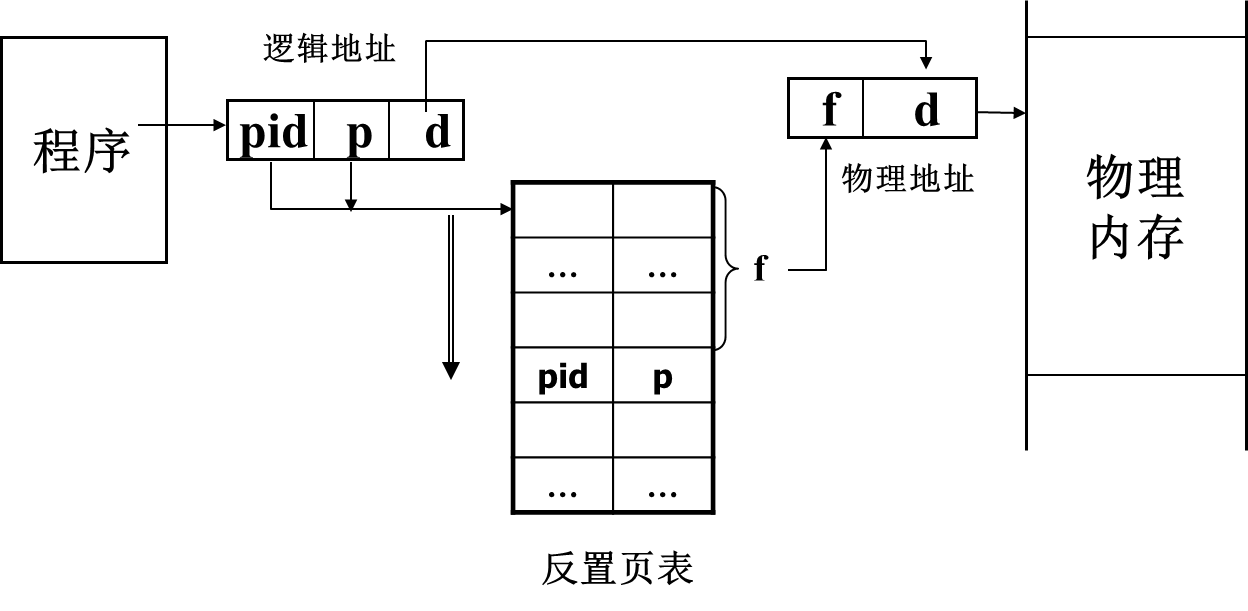
反置页表
- 反置页表面向内存空间
- 对每个内存页框设置一个表项,表项的序号为物理页框号f,表项的内容为进程标识pid与逻辑页号p的有序对
- 反置页表大小固定
- 整个系统一个反置页表,为所有进程所共用,类似于FAT表
页式存储管理
- 采用杂凑技术的反置页表地址映射
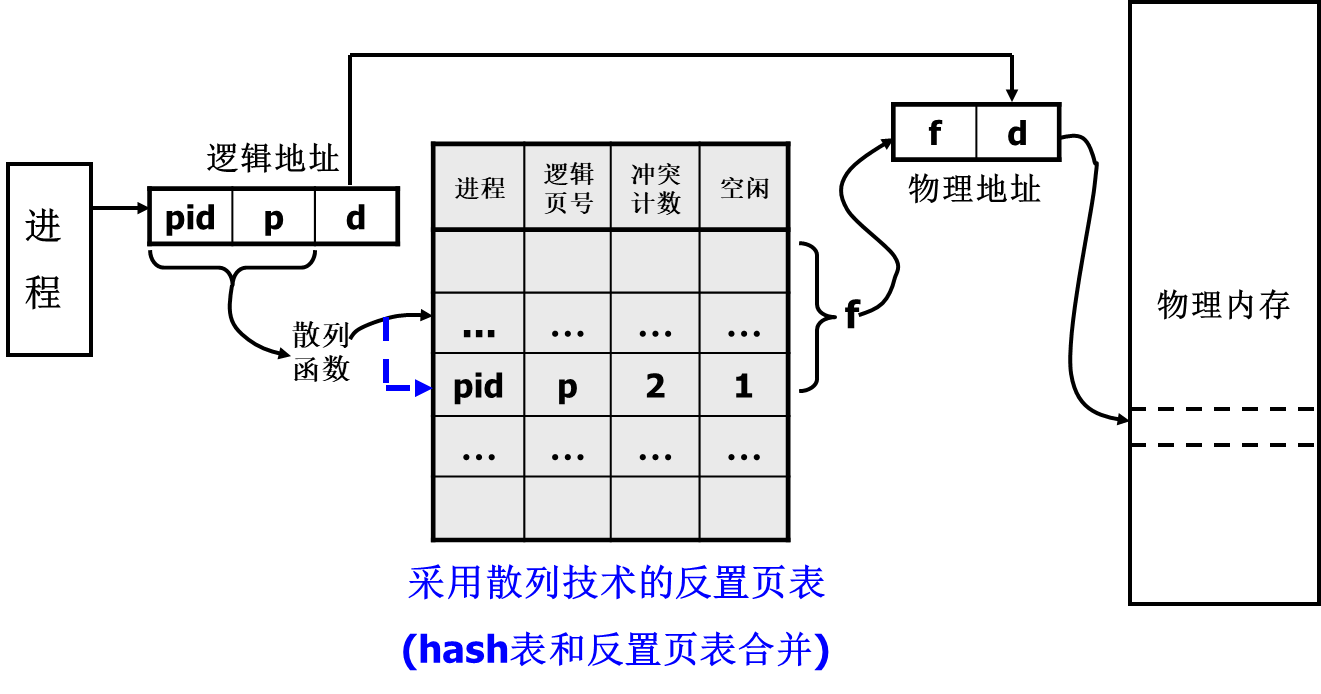
- 在反置页表前增加一级杂凑表(冲突计数和空闲标志)
- 进行地址映射时,由hash(pid,p)计算得到反置页表入口地址
- 从入口地址开始向下探查找到对应的表项,位移f为对应的页框号
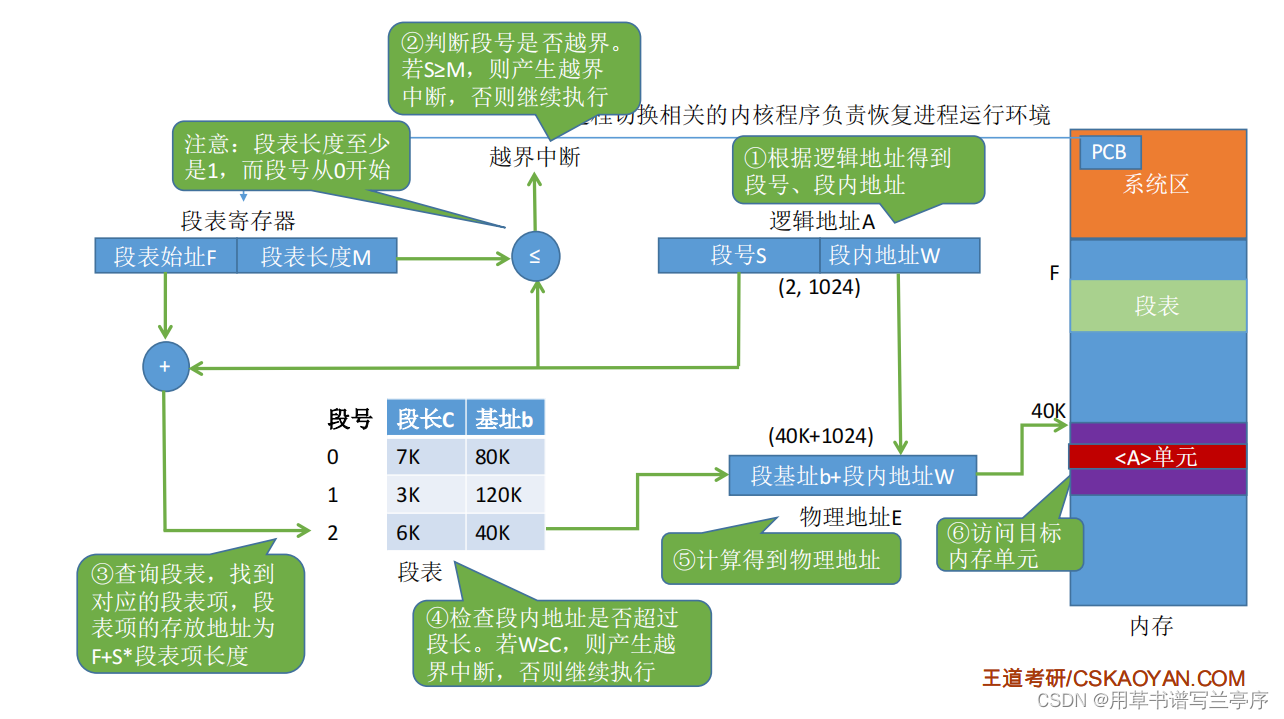
段式存储管理
- 内存空间划分:动态异长,每区一段。
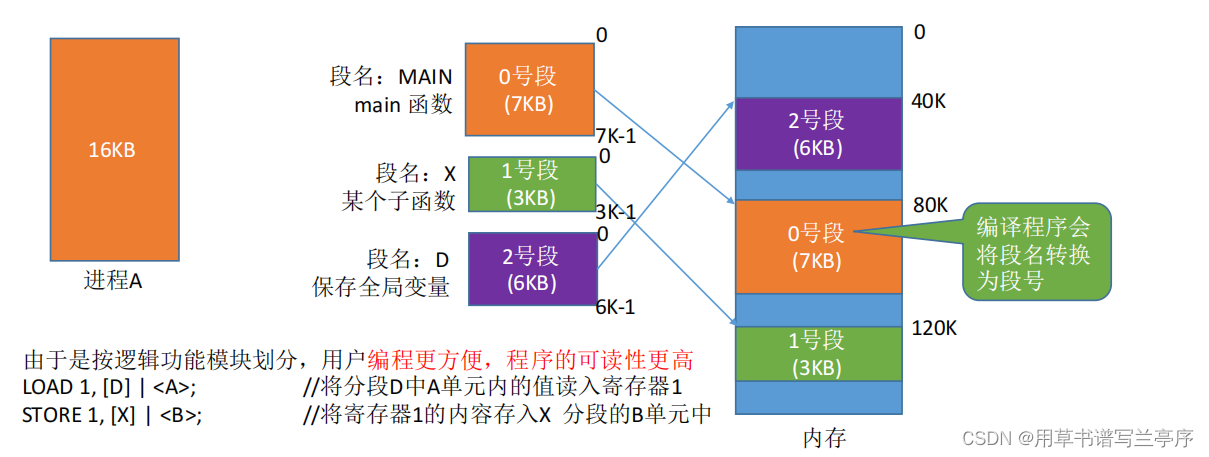
- 进程空间划分:若干段,每段一个程序单位;逻辑地址结构由段号(段名)和段内地址(段内偏移量)所组成

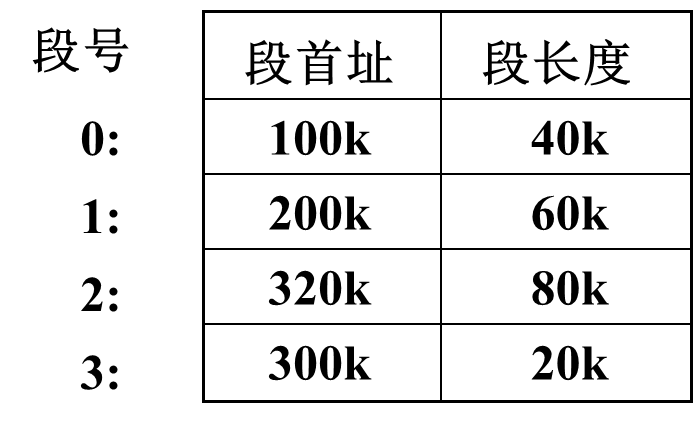
所需表目
- 段表:每个进程一个,记录段号和段首地址的对应关系
- 空闲表:系统一个,用于记录并管理系统中的空闲区域
所需寄存器
- 段表首址寄存器:用于保存正在运行进程的段表首址,系统一个
- 段表长度寄存器:用于保存正在运行进程的段表长度,系统一个
- 快表(TLB):系统一组,用于保存正在运行进程的段表中的部分项目
地址映射:
逻辑地址(s,d)->物理地址(b’+d)
段的共享
共享段表
进程段表(n)->共享段表(1)->共享段(1)

链接共享段时:段名查共享段表
找到,已有进程在用,共享计数加1,段表指向共享段表
未找到,读入内存填共享段表, 共享记数=1,段表指向共享段表
当一个进程结束对某一共享段的访问时,其共享计数减1
当共享计数减到0时,表示没有进程再使用该段,可以释放所占用的存储空间
类似于共享指针
段的保护
- 对于段表和快表加上访问权限(RWE)
- 进程对于共享段的访问往往需要加上某种限制
段页式存储管理
- 段式便于共享和保护
- 页式可以消除碎片问题
段页式:每个进程包含若干段,每个段包含若干页
内存空间划分和页式相同:物理地址=(页框号,页内地址)=
(f,d)进程空间划分:逻辑地址=(段号, 逻辑页号, 页内地址)=
(s,p,d)对应关系:每个进程包含若干段,每个段包含若干页
所需页表
- 段表:进程一个
- 页表:段一个
- 总页表:系统一个,用于记录并管理内存页面
所需寄存器
- 段表基址寄存器:保存正运行程序段表首址
- 段表基址寄存器:保存正运行程序段表首址
- 快表:一组联想寄存器 (快段表+快页表) (TLB),保存正在运行进程的段表和页表中的部分表目
逻辑地址(s,p,d)->物理地址(f,d)
Linux伙伴堆存储分配算法
总结
- 存储管理功能:存储分配和去配、存储共享、存储保护、存储扩充、地址映射
- 内存资源管理
- 静态等长分区的分配:字位映象图、空闲页面表、空闲页面链
- 动态异长分区的分配:最先适应 (First Fit)、下次适应法(Next Fit)、最佳适应 (Best Fit)、最坏适应 (Worst Fit)
- 存储管理方式
- 界地址管理方式(一维地址)
- 页式管理方式(一维地址)
- 段式管理方式(二维地址)
- 段页式管理方式(二维地址)