并发控制(Concurrency Control)
并发是指在同一时间间隔内多个事务相继执行的场景 —— 当事务数量少、间隔久时可依次执行;当事务数量多、间隔短时,就必须通过并发控制避免数据一致性问题。
并发操作会引发三类核心冲突:
- 写写冲突:多个事务同时修改同一数据,导致丢失更新;
- 写读冲突:一个事务读取了另一个事务未提交的修改,导致脏读;
- 读写冲突:同一事务重复读取同一数据时,其他事务修改了该数据,导致不可重复读;或重复执行查询时,其他事务插入 / 删除了符合条件的数据,导致幻读。
所以需要并发控制保证事务执行的隔离性和可串行化—— 即使多个事务并发执行,其结果也等价于按某一顺序串行执行的结果。
并发控制三大核心思想
- 悲观控制(事前控制):假设冲突一定会发生,提前通过锁机制避免冲突(如两阶段锁);
- 乐观控制(事后控制):假设冲突很少发生,事务执行时不限制,提交前检测冲突并处理(如时间戳协议、OCC);
- 多版本机制(空间复用):保存数据项的多个版本,不同事务访问不同版本,提升并发度(可与悲观 / 乐观控制结合)。
锁(Lock)
锁是控制数据项并发访问的核心机制,通过限制事务对数据的访问权限避免冲突。
- 共享锁(S 锁):仅允许读取数据,多个事务可同时持有同一数据的 S 锁;
- 排他锁(X 锁):允许读写数据,同一时间仅一个事务可持有某数据的 X 锁。
| S 锁 | X 锁 | |
|---|---|---|
| S 锁 | 兼容(可共存) | 不兼容 |
| X 锁 | 不兼容 | 不兼容 |
规则:当事务申请的锁与数据项上已有的锁兼容时,可直接授予;否则事务需等待,直到已有不兼容锁释放。并且只有共享锁相互兼容
许多事务可以同时持有一个数据项上的共享锁,但是只有当其他事务在一个数据项上不持有任何锁(无论共享锁或排他锁)时,一个事务才允许持有该数据项上的排他锁。
锁协议(Locking Protocol)
两阶段锁协议(2PL)—— 保证可串行化的核心协议:该协议要求每个事务分两个阶段提出加锁和解锁申请。
事务的锁操作分为两个阶段,严格遵循 “先加锁、后释放” 的顺序:
- 增长阶段(growing phase):仅申请锁,不释放锁(事务可不断获取新锁);
- 缩减阶段(shrinking phase):仅释放锁,不申请锁(事务一旦释放第一个锁,就不能再获取新锁)。
保证并发调度的冲突可串行化—— 事务的串行化顺序等价于它们的 “锁点” 顺序(锁点即事务获取最后一个锁的时刻)。
同时还有严格两阶段锁(Strict 2PL)与强两阶段锁(Rigorous 2PL)
两阶段锁虽能保证可串行化,但可能导致级联回滚(一个事务回滚引发多个依赖它的事务回滚)和不可恢复调度。因此衍生出两种增强协议:
- 严格两阶段锁
- 事务必须持有所有排他锁(X 锁) 直到事务提交或中止后才释放;共享锁(S 锁)可在收缩阶段提前释放。
- 避免级联回滚,保证调度的可恢复性。因为排他锁持有到提交,其他事务无法读取未提交的修改(避免脏读),且已提交事务的修改不会因其他事务回滚而失效。
- 强两阶段锁
- 事务必须持有所有锁(包括 S 锁和 X 锁) 直到提交或中止后才释放。
- 特点:串行化顺序等价于事务的提交顺序,并发度低于严格 2PL,但数据一致性更强,实现更简单。
| 协议 | 核心规则 | 可串行化 | 可恢复性 | 并发度 |
|---|---|---|---|---|
| 两阶段锁(2PL) | 生长阶段加锁,收缩阶段释放 | 是 | 否 | 高 |
| 严格 2PL | X 锁持有到提交,S 锁可提前释放 | 是 | 是 | 中 |
| 强 2PL | 所有锁持有到提交 | 是 | 是 | 低 |
锁转换(lock conversion):
- 升级(upgrade):共享锁 -> 排他锁,只能发生在增长阶段。
- 降级(downgrade):排他锁 -> 共享锁,只能发生在缩减阶段。
死锁检测(Deadlock Detection)
死锁是锁机制的必然问题 —— 多个事务相互等待对方持有的锁,导致所有事务都无法继续执行。
例如:T3 持有 B 的 X 锁,申请 A 的 X 锁;T4 持有 A 的 X 锁,申请 B 的 X 锁。T3 和 T4 相互等待,陷入死锁。
产生条件/必要条件(缺一不可)
- 互斥条件:数据项的锁具有排他性(如 X 锁同一时间仅一个事务持有);
- 持有并等待:事务持有部分锁,同时等待其他事务的锁;
- 不可剥夺:锁只能由持有事务主动释放,不能被强制剥夺;
- 循环等待:多个事务形成等待环(如 T1→T2→T3→T1)。
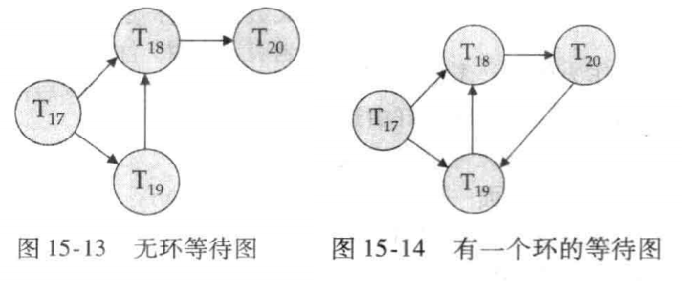
同时死锁可以用称为等待图(wait-for graph)的有向图来精确描述。
该图由 G=(V,E) 对组成,其中 V 是顶点集,E 是边集。
- 顶点集由系统中的所有活跃的事务(正在执行且未提交 / 中止的事务);
- 有向边 Ti→Tj 表示事务 Ti 正在等待 Tj 释放其需要的锁
等待图的维护规则
- 当事务 Ti 申请的数据项被 Tj 持有(且锁不兼容)时,在等待图中添加边 Ti→Tj;
- 当 Tj 释放 Ti 所需的锁(或 Tj 中止)时,删除边 Ti→Tj;
- 当事务完成(提交 / 中止)时,将其对应的顶点及所有关联边从图中移除。
当且仅当等待图包含环时,系统中存在死锁。在该环中的每个事务称为处于死锁。要检测死锁,系统需要维护等待图,并周期性地激活一个在等待图中搜索环的算法。
同时如果已经进入死锁则需要死锁恢复:打破循环
- 步骤 1:选择 “牺牲者”(需回滚的事务):
- 选择标准:最小化回滚成本(如事务启动时间短、已执行语句少、加锁数据项少);
- 避免饿死:记录事务的回滚次数,多次回滚的事务优先不被选为牺牲者。
- 步骤 2:事务回滚:
- 全部回滚:中止事务并重启(简单但效率低);
- 部分回滚:仅回滚到能打破死锁的位置(需记录事务的操作日志,实现复杂但高效)。
[!tip]
- 死锁:多个事务相互等待,永久无法继续;
- 饿死:单个事务长期等待锁(如 T2 申请 X 锁,而系统不断授予其他事务 S 锁),始终无法获得锁;
- 避免饿死的方案:锁请求队列遵循 “先来先服务” 原则,优先满足等待时间最长的事务。