物联网控制系统
伺服系统——步进电机及其驱动技术
伺服系统
- 伺服系统是一种以机械位置或角度作为控制对象的自动控制系统
- 组成:检测装置,驱动电机
[!note]
伺服系统按控制方式的分类:
开环系统:步进电机,无位置反馈,投资低,精度小
闭环系统:直接测量实际位移进行反馈,精度高
半闭环系统:间接测量位移进行反馈,精度低于闭环
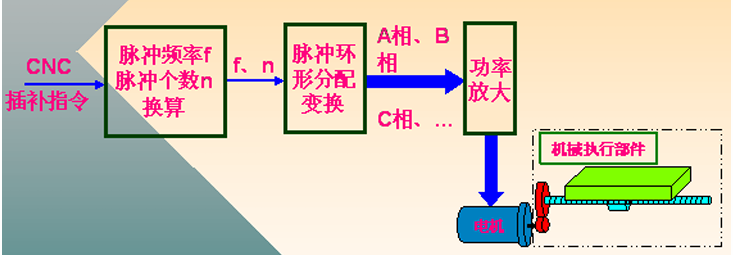
开环伺服系统
- 采用步进电机作为驱动元件
- 没有反馈回路
- 设备投资低,调试维修方便,但精度差,高速扭矩小
- 中、低档控制系统
闭环伺服系统
- 位置检测装置安装在工作台上
- 检测装置构成闭环位置控制
- 大量用在精度要求较高的设备上
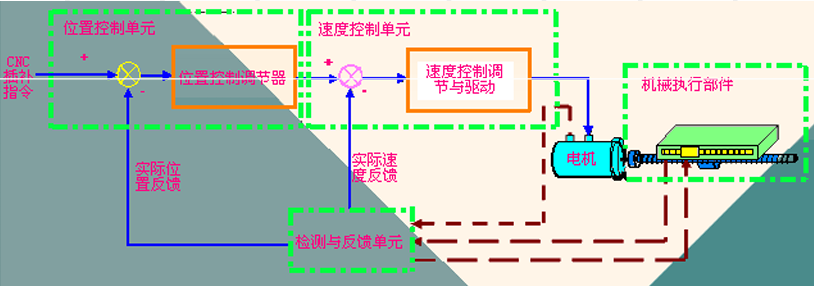
半闭环伺服系统
- 位置检测元件安装在电动机轴上或丝杠上,用以精确控 制电机的角度,为间接测量
- 坐标运动的传动链有一部分在位置闭环以外,其传动误差没有得到系统的补偿
- 精度低于闭环系统。 适用于精度要求适中的设备
步进电机
- 步进电机在开环状态就能实现精确的位置控制
结构简单;没有控制参数设计及其调试的问题;不存在稳定性问题;接线简单
步进电机的类型:永磁式;变磁阻式(反应式);混合式
- 其中定子绕组相数:两相(应用广泛)、三相、四相、五相
两相混合式步进电机结构
大体上由定子和转子组成:
- 定子上有八个绕有线圈的铁心磁极;八个线圈串接成A,B两组绕组
- 每个定子磁极边缘有多个小齿,一般多为五或六齿
- 转子由两段有齿环形转子铁心、装在转子铁心内部的环形 磁钢及轴承、轴组成
- 两段转子铁心的一端呈N极性, 另一端呈S极性,分别称之为N段转子和S段转子
- 转子铁心的边缘加工有小齿,一般为50个,齿距为7.2°。两段转子的小齿相互错开1/2齿距
两相混合式步进电机工作原理
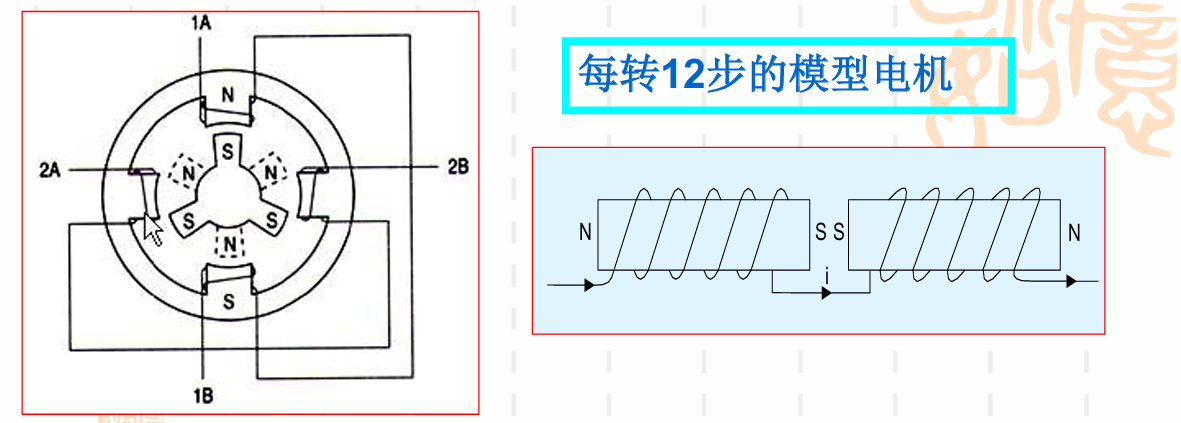
- 定子上有四个绕有线圈的磁极(齿),相对磁极的线圈串联 组成两相绕组
- 同一相绕组两个线圈绕线的方向相反,通过同一电流时所产生的磁场方向也相反
- 电流从相反方向流过同一相绕组产生的磁场方向也相反
- 每段永磁体有3个齿,齿距为120度,N极齿和S极齿彼此错开1/2齿距(60度)
工作状态
不通电
- 由于磁通总是沿磁阻最小的路径通过, 磁通从N极性转子经定子极回到S极性转子
- 有一个反向力矩阻止外力力图使轴转动,称为自锁(detent)力矩
单四拍工作状态
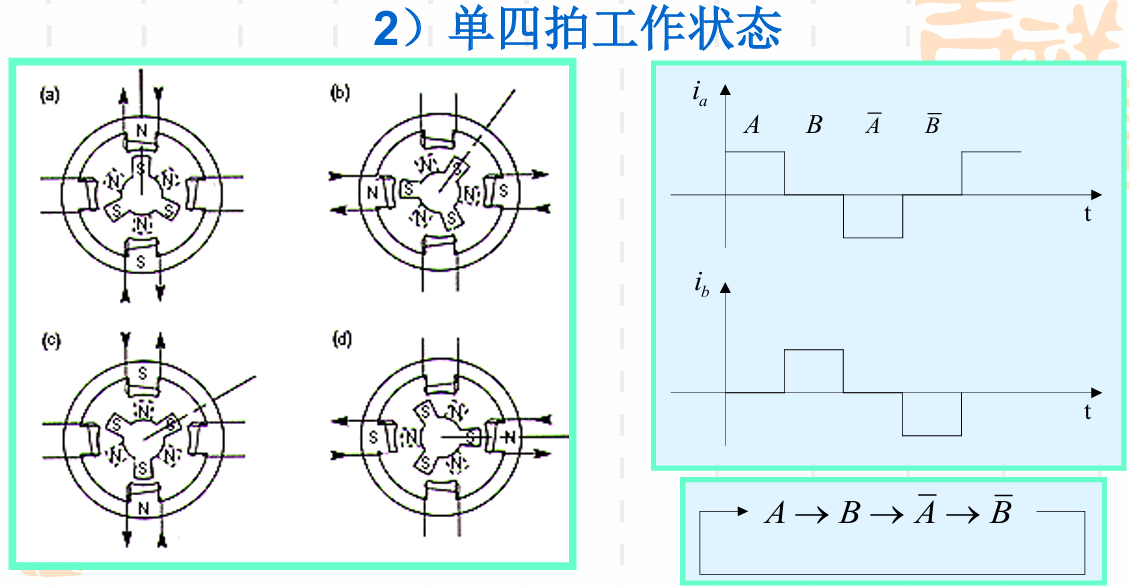
- 初始状态,A相通电产生保持力矩
- 4步一个循环后共转过一个齿距120度,12步后转子旋转一周
- 每一次仅一相绕组通电,四拍一个循环,称之为单四拍工作状态
双四拍工作状态
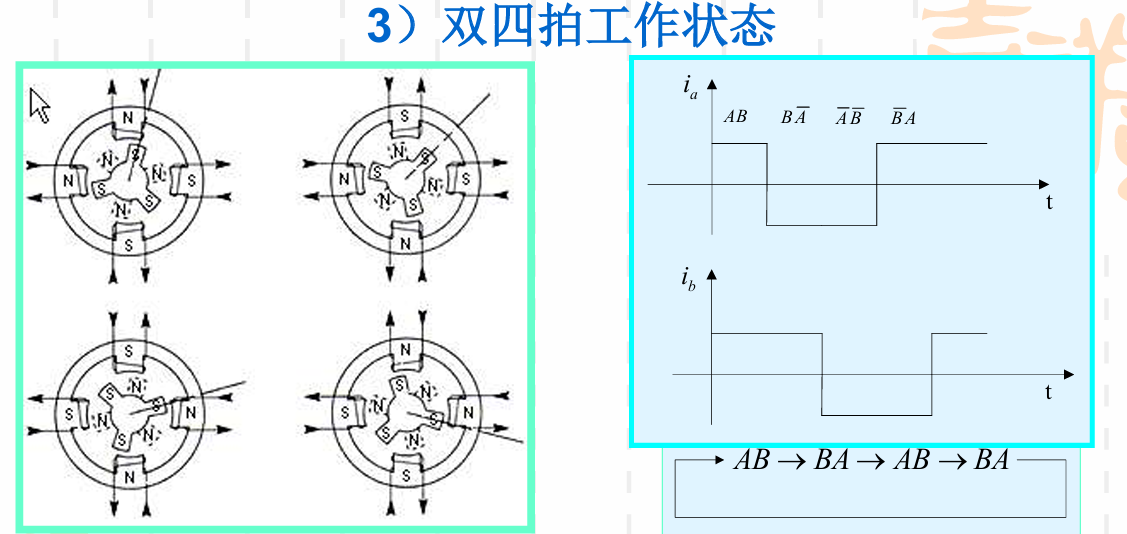
- 初始状态, A相、B相同时通电,由于两个定子齿的吸引,转子 移动1/8齿距15度,停在一个中间的位置
- 4步一个循环后共转过一个齿距120度, 12步后转子旋转一周
- 每一次两相绕组通电,四拍一个循环,称之为双四拍工作状态
- 因为两个线圈同时通电,产生的力矩比单四拍要大
单双八拍工作状态
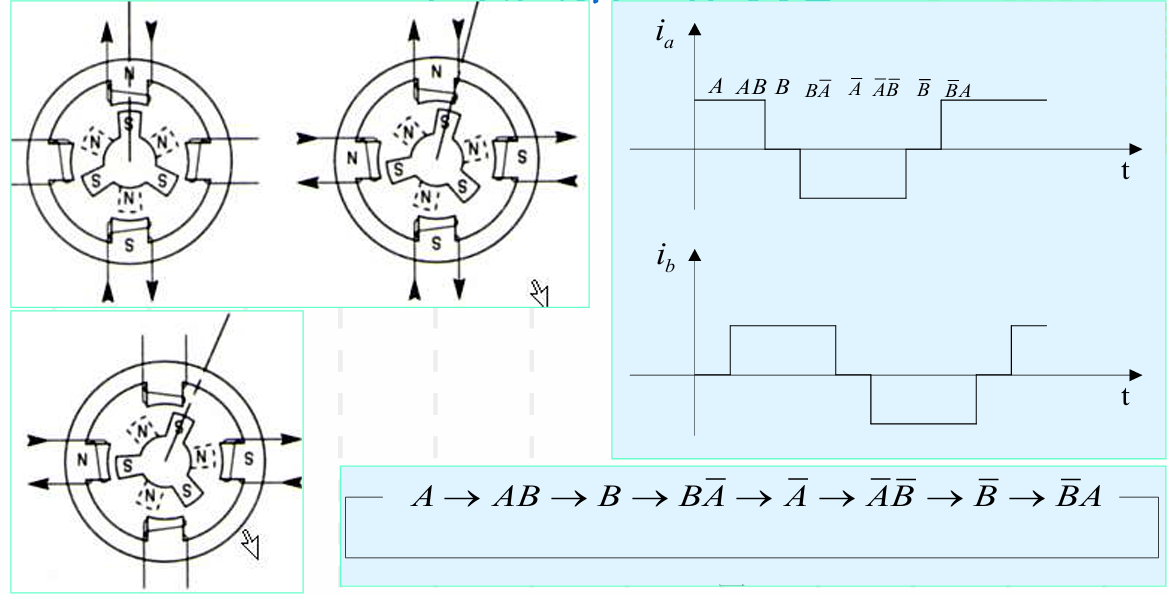
- 在单四拍工作方式基础上,在每两个单拍之间插入一个 双拍工作状态,就成为单、双八拍工作方式
- 交替使一个线圈和两个线圈通电,每一步转子旋转1/8齿距即15度,经过这8拍以后,转子转过一个齿距120度
- 旋转一周需24步
微步距工作方式
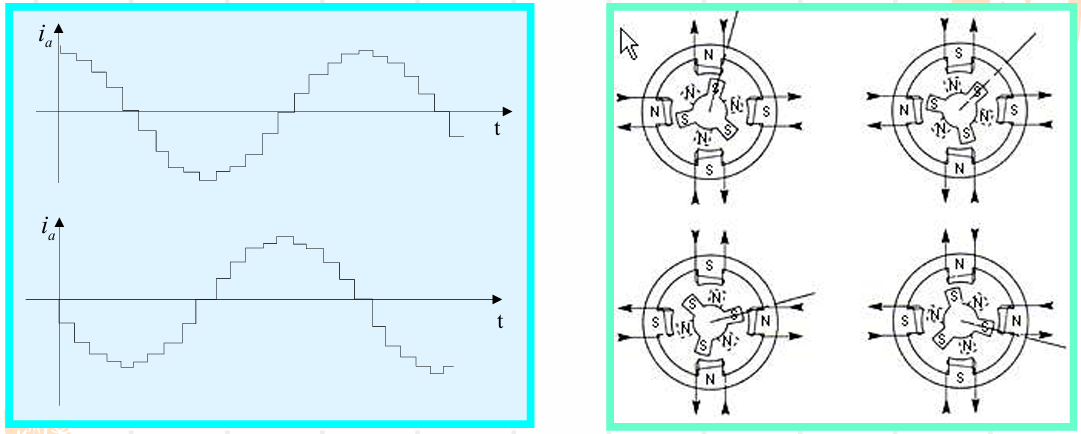
- 在双四拍工作方式中,当两相绕组通以相等的电流时,电机 转子停在一个中间的位置。
- 如果两相绕组电流不等,转子位 置将朝电流大的定子极方向偏移。
评论区 - 07_物联网控制系统